Registration Desk: Registration / Check-in Mon 1 May 07:00 a.m.
Registration and Check-in are located in the lobby of the convention center near the Radisson entrance.
Opening Remarks Mon 1 May 08:15 a.m.
Invited Talk: Sofia Crespo
Entanglements, Exploring Artificial Biodiversity
Sofia Crespo shares about her artistic practice and journey using generative systems, especially neural networks, as a means to explore speculative lifeforms, and how technology can bring us closer to the natural world.
Bio :
Oral 1 Track 3: Neuroscience and Cognitive Science & General Machine Learning Mon 1 May 10:00 a.m.
[ AD1 ]
Latent manifolds provide a compact characterization of neural population activity and of shared co-variability across brain areas. Nonetheless, existing statistical tools for extracting neural manifolds face limitations in terms of interpretability of latents with respect to task variables, and can be hard to apply to datasets with no trial repeats. Here we propose a novel probabilistic framework that allows for interpretable partitioning of population variability within and across areas in the context of naturalistic behavior. Our approach for task aligned manifold estimation (TAME-GP) explicitly partitions variability into private and shared sources which can themselves be subdivided in task-relevant and task irrelevant components, uses a realistic Poisson noise model, and introduces temporal smoothing of latent trajectories in the form of a Gaussian Process prior. This TAME-GP graphical model allows for robust estimation of task-relevant variability in local population responses, and of shared co-variability between brain areas. We demonstrate the efficiency of our estimator on within model and biologically motivated simulated data. We also apply it to several datasets of neural population recordings during behavior. Overall, our results demonstrate the capacity of TAME-GP to capture meaningful intra- and inter-area neural variability with single trial resolution.
[ AD1 ]
Deep Reinforcement Learning (RL) has emerged as a powerful paradigm for training neural policies to solve complex control tasks. However, these policies tend to be overfit to the exact specifications of the task and environment they were trained on, and thus do not perform well when conditions deviate slightly or when composed hierarchically to solve even more complex tasks. Recent work has shown that training a mixture of policies, as opposed to a single one, that are driven to explore different regions of the state-action space can address this shortcoming by generating a diverse set of behaviors, referred to as skills, that can be collectively used to great effect in adaptation tasks or for hierarchical planning. This is typically realized by including a diversity term - often derived from information theory - in the objective function optimized by RL. However these approaches often require careful hyperparameter tuning to be effective. In this work, we demonstrate that less widely-used neuroevolution methods, specifically Quality Diversity (QD), are a competitive alternative to information-theory-augmented RL for skill discovery. Through an extensive empirical evaluation comparing eight state-of-the-art algorithms (four flagship algorithms from each line of work) on the basis of (i) metrics directly evaluating the …
[ AD1 ]
Neurons in the brain are often finely tuned for specific task variables. Moreover, such disentangled representations are highly sought after in machine learning. Here we mathematically prove that simple biological constraints on neurons, namely nonnegativity and energy efficiency in both activity and weights, promote such sought after disentangled representations by enforcing neurons to become selective for single factors of task variation. We demonstrate these constraints lead to disentanglement in a variety of tasks and architectures, including variational autoencoders. We also use this theory to explain why the brain partitions its cells into distinct cell types such as grid and object-vector cells, and also explain when the brain instead entangles representations in response to entangled task factors. Overall, this work provides a mathematical understanding of why single neurons in the brain often represent single human-interpretable factors, and steps towards an understanding task structure shapes the structure of brain representation.
[ AD1 ]
Recent approximations to backpropagation (BP) have mitigated many of BP's computational inefficiencies and incompatibilities with biology, but important limitations still remain. Moreover, the approximations significantly decrease accuracy in benchmarks, suggesting that an entirely different approach may be more fruitful. Here, grounded on recent theory for Hebbian learning in soft winner-take-all networks, we present multilayer SoftHebb, i.e. an algorithm that trains deep neural networks, without any feedback, target, or error signals. As a result, it achieves efficiency by avoiding weight transport, non-local plasticity, time-locking of layer updates, iterative equilibria, and (self-) supervisory or other feedback signals – which were necessary in other approaches. Its increased efficiency and biological compatibility do not trade off accuracy compared to state-of-the-art bio-plausible learning, but rather improve it. With up to five hidden layers and an added linear classifier, accuracies on MNIST, CIFAR-10, STL-10, and ImageNet, respectively reach 99.4%, 80.3%, 76.2%, and 27.3%. In conclusion, SoftHebb shows with a radically different approach from BP that Deep Learning over few layers may be plausible in the brain and increases the accuracy of bio-plausible machine learning. Code is available at https://github.com/NeuromorphicComputing/SoftHebb.
[ AD1 ]

The domain generalization (DG) setup considers the problem where models are trained on data sampled from multiple domains and evaluated on test domains unseen during training. In this paper, we formulate DG as a sample selection problem where each domain is sampled from a common underlying population through non-random sampling probabilities that correlate with both the features and the outcome. Under this setting, the fundamental iid assumption of the empirical risk minimization (ERM) is violated, so it often performs worse on test domains whose non-random sampling probabilities differ from the domains in the training dataset. We propose a Selection-Guided DG (SGDG) framework to learn the selection probability of each domain and the joint distribution of the outcome and domain selection variables. The proposed SGDG is domain generalizable as it intends to minimize the risk under the population distribution. We theoretically proved that, under certain regular conditions, SGDG can achieve smaller risk than ERM. Furthermore, we present a class of parametric SGDG (HeckmanDG) estimators applicable to continuous, binary, and multinomial outcomes. We also demonstrated its efficacy empirically through simulations and experiments on a set of benchmark datasets comparing with other well-known DG methods.
Oral 1 Track 5: Reinforcement Learning Mon 1 May 10:00 a.m.
[ AD12 ]

Muscle-actuated organisms are capable of learning an unparalleled diversity of dexterous movements despite their vast amount of muscles. Reinforcement learning (RL) on large musculoskeletal models, however, has not been able to show similar performance. We conjecture that ineffective exploration in large overactuated action spaces is a key problem.This is supported by the finding that common exploration noise strategies are inadequate in synthetic examples of overactuated systems. We identify differential extrinsic plasticity (DEP), a method from the domain of self-organization, as being able to induce state-space covering exploration within seconds of interaction. By integrating DEP into RL, we achieve fast learning of reaching and locomotion in musculoskeletal systems, outperforming current approaches in all considered tasks in sample efficiency and robustness.
[ AD12 ]

Reinforcement learning (RL) agents can leverage batches of previously collected data to extract a reasonable control policy. An emerging issue in this offline RL setting, however, is that the bootstrapping update underlying many of our methods suffers from insufficient action-coverage: standard max operator may select a maximal action that has not been seen in the dataset. Bootstrapping from these inaccurate values can lead to overestimation and even divergence. There are a growing number of methods that attempt to approximate an in-sample max, that only uses actions well-covered by the dataset. We highlight a simple fact: it is more straightforward to approximate an in-sample softmax using only actions in the dataset. We show that policy iteration based on the in-sample softmax converges, and that for decreasing temperatures it approaches the in-sample max. We derive an In-Sample Actor-Critic (AC), using this in-sample softmax, and show that it is consistently better or comparable to existing offline RL methods, and is also well-suited to fine-tuning. We release the code at github.com/hwang-ua/inac_pytorch.
[ AD12 ]

[ AD12 ]

[ AD12 ]
Inverse reinforcement learning (IRL) methods assume that the expert data is generated by an agent optimizing some reward function. However, in many settings, the agent may optimize a reward function subject to some constraints, where the constraints induce behaviors that may be otherwise difficult to express with just a reward function. We consider the setting where the reward function is given, and the constraints are unknown, and propose a method that is able to recover these constraints satisfactorily from the expert data. While previous work has focused on recovering hard constraints, our method can recover cumulative soft constraints that the agent satisfies on average per episode. In IRL fashion, our method solves this problem by adjusting the constraint function iteratively through a constrained optimization procedure, until the agent behavior matches the expert behavior. We demonstrate our approach on synthetic environments, robotics environments and real world highway driving scenarios.
[ AD12 ]
The potential of offline reinforcement learning (RL) is that high-capacity models trained on large, heterogeneous datasets can lead to agents that generalize broadly, analogously to similar advances in vision and NLP. However, recent works argue that offline RL methods encounter unique challenges to scaling up model capacity. Drawing on the learnings from these works, we re-examine previous design choices and find that with appropriate choices: ResNets, cross-entropy based distributional backups, and feature normalization, offline Q-learning algorithms exhibit strong performance that scales with model capacity. Using multi-task Atari as a testbed for scaling and generalization, we train a single policy on 40 games with near-human performance using up-to 80 million parameter networks, finding that model performance scales favorably with capacity. In contrast to prior work, we extrapolate beyond dataset performance even when trained entirely on a large (400M transitions) but highly suboptimal dataset (51% human-level performance). Compared to return-conditioned supervised approaches, offline Q-learning scales similarly with model capacity and has better performance, especially when the dataset is suboptimal. Finally, we show that offline Q-learning with a diverse dataset is sufficient to learn powerful representations that facilitate rapid transfer to novel games and fast online learning on new variations of a training …
[ AD12 ]
Oral 1 Track 6: Deep Learning and representational learning II Mon 1 May 10:00 a.m.
[ AD10 ]
Sparse Neural Networks (SNNs) have received voluminous attention predominantly due to growing computational and memory footprints of consistently exploding parameter count in large-scale models. Similar to their dense counterparts, recent SNNs generalize just as well and are equipped with numerous favorable benefits (e.g., low complexity, high scalability, and robustness), sometimes even better than the original dense networks. As research effort is focused on developing increasingly sophisticated sparse algorithms, it is startling that a comprehensive benchmark to evaluate the effectiveness of these algorithms has been highly overlooked. In absence of a carefully crafted evaluation benchmark, most if not all, sparse algorithms are evaluated against fairly simple and naive tasks (eg. CIFAR-10/100, ImageNet, GLUE, etc.), which can potentially camouflage many advantages as well unexpected predicaments of SNNs. In pursuit of a more general evaluation and unveiling the true potential of sparse algorithms, we introduce “Sparsity May Cry” Benchmark (SMC-Bench), a collection of carefully-curated 4 diverse tasks with 10 datasets, that accounts for capturing a wide range of domain-specific and sophisticated knowledge. Our systemic evaluation of the most representative sparse algorithms reveals an important obscured observation: the state-of-the-art magnitude- and/or gradient-based sparse algorithms seemingly fail to perform on SMC-Bench when applied out-of-the-box, sometimes …
[ AD10 ]

Incorporating second-order gradient information (curvature) into optimization can dramatically reduce the number of iterations required to train machine learning models. In natural gradient descent, such information comes from the Fisher information matrix which yields a number of desirable properties. As exact natural gradient updates are intractable for large models, successful methods such as KFAC and sequels approximate the Fisher in a structured form that can easily be inverted. However, this requires model/layer-specific tensor algebra and certain approximations that are often difficult to justify. Here, we use ideas from Legendre-Fenchel duality to learn a direct and efficiently evaluated model for the product of the inverse Fisher with any vector, in an online manner, leading to natural gradient steps that get progressively more accurate over time despite noisy gradients. We prove that the resulting “Fisher-Legendre” (FishLeg) optimizer converges to a (global) minimum of non-convex functions satisfying the PL condition, which applies in particular to deep linear networks. On standard auto-encoder benchmarks, we show empirically that FishLeg outperforms standard first-order optimization methods, and performs on par with or better than other second-order methods, especially when using small batches. Thanks to its generality, we expect our approach to facilitate the handling of a variety …
[ AD10 ]
Recent empirical studies on domain generalization (DG) have shown that DG algorithms that perform well on some distribution shifts fail on others, and no state-of-the-art DG algorithm performs consistently well on all shifts. Moreover, real-world data often has multiple distribution shifts over different attributes; hence we introduce multi-attribute distribution shift datasets and find that the accuracy of existing DG algorithms falls even further. To explain these results, we provide a formal characterization of generalization under multi-attribute shifts using a canonical causal graph. Based on the relationship between spurious attributes and the classification label, we obtain realizations of the canonical causal graph that characterize common distribution shifts and show that each shift entails different independence constraints over observed variables. As a result, we prove that any algorithm based on a single, fixed constraint cannot work well across all shifts, providing theoretical evidence for mixed empirical results on DG algorithms. Based on this insight, we develop Causally Adaptive Constraint Minimization (CACM), an algorithm that uses knowledge about the data-generating process to adaptively identify and apply the correct independence constraints for regularization. Results on fully synthetic, MNIST, small NORB, and Waterbirds datasets, covering binary and multi-valued attributes and labels, show that adaptive dataset-dependent …
[ AD10 ]

Distillation-aware Network Architecture Search (DaNAS) aims to search for an optimal student architecture that obtains the best performance and/or efficiency when distilling the knowledge from a given teacher model. Previous DaNAS methods have mostly tackled the search for the network architecture for fixed source/target tasks and the teacher, which are not generalized well on a new task, thus need to perform a costly search for any new combination of the domains and the teachers. For standard NAS tasks without KD, meta-learning-based computationally efficient NAS methods have been proposed, which learn the generalized search process over multiple tasks and transfer the knowledge obtained over those tasks to a new task. However, since they assume learning from scratch without KD from a teacher, they might not be ideal for DaNAS scenarios, which could significantly affect the final performances of the architectures obtained from the search. To eliminate the excessive computational cost of DaNAS methods and the sub-optimality of rapid NASmethods, we propose a distillation-aware meta accuracy prediction model, DaSS (Distillation-aware Student Search), which can predict a given architecture’s final performances on a dataset when performing KD with a given teacher, without having actually to train it on the target task. The experimental …
[ AD10 ]
Neural Representations have recently been shown to effectively reconstruct a wide range of signals from 3D meshes and shapes to images and videos. We show that, when adapted correctly, neural representations can be used to directly represent the weights of a pre-trained convolutional neural network, resulting in a Neural Representation for Neural Networks (NeRN). Inspired by coordinate inputs of previous neural representation methods, we assign a coordinate to each convolutional kernel in our network based on its position in the architecture, and optimize a predictor network to map coordinates to their corresponding weights. Similarly to the spatial smoothness of visual scenes, we show that incorporating a smoothness constraint over the original network's weights aids NeRN towards a better reconstruction. In addition, since slight perturbations in pre-trained model weights can result in a considerable accuracy loss, we employ techniques from the field of knowledge distillation to stabilize the learning process. We demonstrate the effectiveness of NeRN in reconstructing widely used architectures on CIFAR-10, CIFAR-100, and ImageNet. Finally, we present two applications using NeRN, demonstrating the capabilities of the learned representations.
[ AD10 ]
Domain Adaptation of Black-box Predictors (DABP) aims to learn a model on an unlabeled target domain supervised by a black-box predictor trained on a source domain. It does not require access to both the source-domain data and the predictor parameters, thus addressing the data privacy and portability issues of standard domain adaptation methods. Existing DABP approaches mostly rely on knowledge distillation (KD) from the black-box predictor, i.e., training the model with its noisy target-domain predictions, which however inevitably introduces the confirmation bias accumulated from the prediction noises and leads to degrading performance. To mitigate such bias, we propose a new strategy, \textit{divide-to-adapt}, that purifies cross-domain knowledge distillation by proper domain division. This is inspired by an observation we make for the first time in domain adaptation: the target domain usually contains easy-to-adapt and hard-to-adapt samples that have different levels of domain discrepancy w.r.t. the source domain, and deep models tend to fit easy-to-adapt samples first. Leveraging easy-to-adapt samples with less noise can help KD alleviate the negative effect of prediction noises from black-box predictors. In this sense, the target domain can be divided into an easy-to-adapt subdomain with less noise and a hard-to-adapt subdomain at the early stage of training. …
[ AD10 ]

Limited progress has been made in continual unsupervised learning of representations, especially in reusing, expanding, and continually disentangling learned semantic factors across data environments. We argue that this is because existing approaches treat continually-arrived data independently, without considering how they are related based on the underlying semantic factors. We address this by a new generative model describing a topologically-connected mixture of spike-and-slab distributions in the latent space, learned end-to-end in a continual fashion via principled variational inference. The learned mixture is able to automatically discover the active semantic factors underlying each data environment and to accumulate their relational structure based on that. This distilled knowledge of different data environments can further be used for generative replay and guiding continual disentangling of new semantic factors. We tested the presented method on a split version of 3DShapes to provide the first quantitative disentanglement evaluation of continually learned representations, and further demonstrated its ability to continually disentangle new representations in benchmark datasets.
Oral 1 Track 1: Deep Learning and representational learning I Mon 1 May 10:00 a.m.
[ Auditorium ]
We introduce Token Merging (ToMe), a simple method to increase the throughput of existing ViT models without needing to train. ToMe gradually combines similar tokens in a transformer using a general and light-weight matching algorithm that is as fast as pruning while being more accurate. Off-the-shelf, ToMe can 2x the throughput of state-of-the-art ViT-L @ 512 and ViT-H @ 518 models on images and 2.2x the throughput of ViT-L on video with only a 0.2-0.3% accuracy drop in each case. ToMe can also easily be applied during training, improving in practice training speed up to 2x for MAE fine-tuning on video. Training with ToMe further minimizes accuracy drop, leading to 2x the throughput of ViT-B on audio for only a 0.4% mAP drop. Qualitatively, we find that ToMe merges object parts into one token, even over multiple frames of video. Overall, ToMe’s accuracy and speed are competitive with state-of-the-art on images, video, and audio.
[ Auditorium ]

[ Auditorium ]
Partitioning a set of elements into subsets of a priori unknown sizes is essential in many applications. These subset sizes are rarely explicitly learned - be it the cluster sizes in clustering applications or the number of shared versus independent generative latent factors in weakly-supervised learning. Probability distributions over correct combinations of subset sizes are non-differentiable due to hard constraints, which prohibit gradient-based optimization. In this work, we propose the differentiable hypergeometric distribution. The hypergeometric distribution models the probability of different group sizes based on their relative importance. We introduce reparameterizable gradients to learn the importance between groups and highlight the advantage of explicitly learning the size of subsets in two typical applications: weakly-supervised learning and clustering. In both applications, we outperform previous approaches, which rely on suboptimal heuristics to model the unknown size of groups.
[ Auditorium ]
Reliable generalization lies at the heart of safe ML and AI. However, understanding when and how neural networks generalize remains one of the most important unsolved problems in the field. In this work, we conduct an extensive empirical study (20'910 models, 15 tasks) to investigate whether insights from the theory of computation can predict the limits of neural network generalization in practice. We demonstrate that grouping tasks according to the Chomsky hierarchy allows us to forecast whether certain architectures will be able to generalize to out-of-distribution inputs. This includes negative results where even extensive amounts of data and training time never lead to any non-trivial generalization, despite models having sufficient capacity to fit the training data perfectly. Our results show that, for our subset of tasks, RNNs and Transformers fail to generalize on non-regular tasks, LSTMs can solve regular and counter-language tasks, and only networks augmented with structured memory (such as a stack or memory tape) can successfully generalize on context-free and context-sensitive tasks.
[ Auditorium ]
This paper studies learning on text-attributed graphs (TAGs), where each node is associated with a text description. An ideal solution for such a problem would be integrating both the text and graph structure information with large language models and graph neural networks (GNNs). However, the problem becomes very challenging when graphs are large due to the high computational complexity brought by training large language models and GNNs together. In this paper, we propose an efficient and effective solution to learning on large text-attributed graphs by fusing graph structure and language learning with a variational Expectation-Maximization (EM) framework, called GLEM. Instead of simultaneously training large language models and GNNs on big graphs, GLEM proposes to alternatively update the two modules in the E-step and M-step. Such a procedure allows training the two modules separately while simultaneously allowing the two modules to interact and mutually enhance each other. Extensive experiments on multiple data sets demonstrate the efficiency and effectiveness of the proposed approach.
Oral 1 Track 2: Machine Learning for Sciences Mon 1 May 10:00 a.m.
[ AD4 ]
Dynamical systems are found in innumerable forms across the physical and biological sciences, yet all these systems fall naturally into equivalence classes: conservative or dissipative, stable or unstable, compressible or incompressible. Predicting these classes from data remains an essential open challenge in computational physics on which existing time-series classification methods struggle. Here, we propose, phase2vec, an embedding method that learns high-quality, physically-meaningful representations of low-dimensional dynamical systems without supervision. Our embeddings are produced by a convolutional backbone that extracts geometric features from flow data and minimizes a physically-informed vector field reconstruction loss. The trained architecture can not only predict the equations of unseen data, but also produces embeddings that encode meaningful physical properties of input data (e.g. stability of fixed points, conservation of energy, and the incompressibility of flows) more faithfully than standard blackbox classifiers and state-of-the-art time series classification techniques. We additionally apply our embeddings to the analysis of meteorological data, showing we can detect climatically meaningful features. Collectively, our results demonstrate the viability of embedding approaches for the discovery of dynamical features in physical systems.
[ AD4 ]
We present a data-driven, space-time continuous framework to learn surrogate models for complex physical systems described by advection-dominated partial differential equations. Those systems have slow-decaying Kolmogorov n-width that hinders standard methods, including reduced order modeling, from producing high-fidelity simulations at low cost. In this work, we construct hypernetwork-based latent dynamical models directly on the parameter space of a compact representation network. We leverage the expressive power of the network and a specially designed consistency-inducing regularization to obtain latent trajectories that are both low-dimensional and smooth. These properties render our surrogate models highly efficient at inference time. We show the efficacy of our framework by learning models that generate accurate multi-step rollout predictions at much faster inference speed compared to competitors, for several challenging examples.
[ AD4 ]
Weather and climate simulations produce petabytes of high-resolution data that are later analyzed by researchers in order to understand climate change or severe weather. We propose a new method of compressing this multidimensional weather and climate data: a coordinate-based neural network is trained to overfit the data, and the resulting parameters are taken as a compact representation of the original grid-based data. While compression ratios range from 300x to more than 3,000x, our method outperforms the state-of-the-art compressor SZ3 in terms of weighted RMSE, MAE. It can faithfully preserve important large scale atmosphere structures and does not introduce significant artifacts.When using the resulting neural network as a 790x compressed dataloader to train the WeatherBench forecasting model, its RMSE increases by less than 2%. The three orders of magnitude compression democratizes access to high-resolution climate data and enables numerous new research directions.
[ AD4 ]
Kohn-Sham Density Functional Theory (KS-DFT) has been traditionally solved by the Self-Consistent Field (SCF) method. Behind the SCF loop is the physics intuition of solving a system of non-interactive single-electron wave functions under an effective potential. In this work, we propose a deep learning approach to KS-DFT. First, in contrast to the conventional SCF loop, we propose to directly minimize the total energy by reparameterizing the orthogonal constraint as a feed-forward computation. We prove that such an approach has the same expressivity as the SCF method, yet reduces the computational complexity from O(N^4) to O(N^3). Second, the numerical integration which involves a summation over the quadrature grids can be amortized to the optimization steps. At each step, stochastic gradient descent (SGD) is performed with a sampled minibatch of the grids. Extensive experiments are carried out to demonstrate the advantage of our approach in terms of efficiency and stability. In addition, we show that our approach enables us to explore more complex neural-based wave functions.
[ AD4 ]
Antibody design is valuable for therapeutic usage and biological research. Existing deep-learning-based methods encounter several key issues: 1) incomplete context for Complementarity-Determining Regions (CDRs) generation; 2) incapability of capturing the entire 3D geometry of the input structure; 3) inefficient prediction of the CDR sequences in an autoregressive manner. In this paper, we propose Multi-channel Equivariant Attention Network (MEAN) to co-design 1D sequences and 3D structures of CDRs. To be specific, MEAN formulates antibody design as a conditional graph translation problem by importing extra components including the target antigen and the light chain of the antibody. Then, MEAN resorts to E(3)-equivariant message passing along with a proposed attention mechanism to better capture the geometrical correlation between different components. Finally, it outputs both the 1D sequences and 3D structure via a multi-round progressive full-shot scheme, which enjoys more efficiency and precision against previous autoregressive approaches. Our method significantly surpasses state-of-the-art models in sequence and structure modeling, antigen-binding CDR design, and binding affinity optimization. Specifically, the relative improvement to baselines is about 23\% in antigen-binding CDR design and 34\% for affinity optimization.
[ AD4 ]

Despite their widespread success in various domains, Transformer networks have yet to perform well across datasets in the domain of 3D atomistic graphs such as molecules even when 3D-related inductive biases like translational invariance and rotational equivariance are considered. In this paper, we demonstrate that Transformers can generalize well to 3D atomistic graphs and present Equiformer, a graph neural network leveraging the strength of Transformer architectures and incorporating SE(3)/E(3)-equivariant features based on irreducible representations (irreps). First, we propose a simple and effective architecture by only replacing original operations in Transformers with their equivariant counterparts and including tensor products. Using equivariant operations enables encoding equivariant information in channels of irreps features without complicating graph structures. With minimal modifications to Transformers, this architecture has already achieved strong empirical results. Second, we propose a novel attention mechanism called equivariant graph attention, which improves upon typical attention in Transformers through replacing dot product attention with multi-layer perceptron attention and including non-linear message passing. With these two innovations, Equiformer achieves competitive results to previous models on QM9, MD17 and OC20 datasets.
[ AD4 ]
Oral 1 Track 4: Social Aspects of Machine Learning Mon 1 May 10:00 a.m.
[ AD11 ]
Large language models (LMs) have been shown to memorize parts of their training data, and when prompted appropriately, they will emit the memorized training data verbatim. This is undesirable because memorization violates privacy (exposing user data), degrades utility (repeated easy-to-memorize text is often low quality), and hurts fairness (some texts are memorized over others).We describe three log-linear relationships that quantify the degree to which LMs emit memorized training data. Memorization significantly grows as we increase (1) the capacity of a model, (2) the number of times an example has been duplicated, and (3) the number of tokens of context used to prompt the model. Surprisingly, we find the situation becomes complicated when generalizing these results across model families. On the whole, we find that memorization in LMs is more prevalent than previously believed and will likely get worse as models continues to scale, at least without active mitigations.
[ AD11 ]

Text classifiers have promising applications in high-stake tasks such as resume screening and content moderation. These classifiers must be fair and avoid discriminatory decisions by being invariant to perturbations of sensitive attributes such as gender or ethnicity. However, there is a gap between human intuition about these perturbations and the formal similarity specifications capturing them. While existing research has started to address this gap, current methods are based on hardcoded word replacements, resulting in specifications with limited expressivity or ones that fail to fully align with human intuition (e.g., in cases of asymmetric counterfactuals). This work proposes novel methods for bridging this gap by discovering expressive and intuitive individual fairness specifications. We show how to leverage unsupervised style transfer and GPT-3's zero-shot capabilities to automatically generate expressive candidate pairs of semantically similar sentences that differ along sensitive attributes. We then validate the generated pairs via an extensive crowdsourcing study, which confirms that a lot of these pairs align with human intuition about fairness in the context of toxicity classification. Finally, we show how limited amounts of human feedback can be leveraged to learn a similarity specification that can be used to train downstream fairness-aware models.
[ AD11 ]
[ AD11 ]

There is a fundamental limitation in the prediction performance that a machine learning model can achieve due to the inevitable uncertainty of the prediction target. In classification problems, this can be characterized by the Bayes error, which is the best achievable error with any classifier. The Bayes error can be used as a criterion to evaluate classifiers with state-of-the-art performance and can be used to detect test set overfitting. We propose a simple and direct Bayes error estimator, where we just take the mean of the labels that show \emph{uncertainty} of the class assignments. Our flexible approach enables us to perform Bayes error estimation even for weakly supervised data. In contrast to others, our method is model-free and even instance-free. Moreover, it has no hyperparameters and gives a more accurate estimate of the Bayes error than several baselines empirically. Experiments using our method suggest that recently proposed deep networks such as the Vision Transformer may have reached, or is about to reach, the Bayes error for benchmark datasets. Finally, we discuss how we can study the inherent difficulty of the acceptance/rejection decision for scientific articles, by estimating the Bayes error of the ICLR papers from 2017 to 2023.
[ AD11 ]
The backdoor attack, where the adversary uses inputs stamped with triggers (e.g., a patch) to activate pre-planted malicious behaviors, is a severe threat to Deep Neural Network (DNN) models. Trigger inversion is an effective way of identifying backdoor models and understanding embedded adversarial behaviors. A challenge of trigger inversion is that there are many ways of constructing the trigger. Existing methods cannot generalize to various types of triggers by making certain assumptions or attack-specific constraints. The fundamental reason is that existing work does not formally define the trigger and the inversion problem. This work formally defines and analyzes the trigger and the inversion problem. Then, it proposes a unified framework to invert backdoor triggers based on the formalization of triggers and the identified inner behaviors of backdoor models from our analysis. Our prototype UNICORN is general and effective in inverting backdoor triggers in DNNs. The code can be found at https://github.com/RU-System-Software-and-Security/UNICORN.
[ AD11 ]

As industrial applications are increasingly automated by machine learning models, enforcing personal data ownership and intellectual property rights requires tracing training data back to their rightful owners. Membership inference algorithms approach this problem by using statistical techniques to discern whether a target sample was included in a model's training set. However, existing methods only utilize the unaltered target sample or simple augmentations of the target to compute statistics. Such a sparse sampling of the model's behavior carries little information, leading to poor inference capabilities. In this work, we use adversarial tools to directly optimize for queries that are discriminative and diverse. Our improvements achieve significantly more accurate membership inference than existing methods, especially in offline scenarios and in the low false-positive regime which is critical in legal settings.
[ AD11 ]
Transformers have become a default architecture in computer vision, but understanding what drives their predictions remains a challenging problem. Current explanation approaches rely on attention values or input gradients, but these provide a limited view of a model’s dependencies. Shapley values offer a theoretically sound alternative, but their computational cost makes them impractical for large, high-dimensional models. In this work, we aim to make Shapley values practical for vision transformers (ViTs). To do so, we first leverage an attention masking approach to evaluate ViTs with partial information, and we then develop a procedure to generate Shapley value explanations via a separate, learned explainer model. Our experiments compare Shapley values to many baseline methods (e.g., attention rollout, GradCAM, LRP), and we find that our approach provides more accurate explanations than existing methods for ViTs.
[ AD11 ]

Poster Session 1 Mon 1 May 11:30 a.m.
[ MH1-2-3-4 ]
Deep generative models learn highly complex and non-linear representations to generate realistic synthetic data. While they have achieved notable success in computer vision and natural language processing, similar advances have been less demonstrable in the tabular domain. This is partially because generative modelling of tabular data entails a particular set of challenges, including heterogeneous relationships, limited number of samples, and difficulties in incorporating prior knowledge. Additionally, unlike their counterparts in image and sequence domain, deep generative models for tabular data almost exclusively employ fully-connected layers, which encode weak inductive biases about relationships between inputs. Real-world data generating processes can often be represented using relational structures, which encode sparse, heterogeneous relationships between variables. In this work, we learn and exploit relational structure underlying tabular data to better model variable dependence, and as a natural means to introduce regularization on relationships and include prior knowledge. Specifically, we introduce GOGGLE, an end-to-end message passing scheme that jointly learns the relational structure and corresponding functional relationships as the basis of generating synthetic samples. Using real-world datasets, we provide empirical evidence that the proposed method is effective in generating realistic synthetic data and exploiting domain knowledge for downstream tasks.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]

Recently, diffusion models have emerged as a new paradigm for generative models. Despite the success in domains using continuous signals such as vision and audio, adapting diffusion models to natural language is under-explored due to the discrete nature of texts, especially for conditional generation. We tackle this challenge by proposing DiffuSeq: a diffusion model designed for sequence-to-sequence (Seq2Seq) text generation tasks. Upon extensive evaluation over a wide range of Seq2Seq tasks, we find DiffuSeq achieving comparable or even better performance than six established baselines, including a state-of-the-art model that is based on pre-trained language models. Apart from quality, an intriguing property of DiffuSeq is its high diversity during generation, which is desired in many Seq2Seq tasks. We further include a theoretical analysis revealing the connection between DiffuSeq and autoregressive/non-autoregressive models. Bringing together theoretical analysis and empirical evidence, we demonstrate the great potential of diffusion models in complex conditional language generation tasks. Code is available at https://github.com/Shark-NLP/DiffuSeq
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]
Standard empirical risk minimization (ERM) training can produce deep neural network (DNN) models that are accurate on average but under-perform in under-represented population subgroups, especially when there are imbalanced group distributions in the long-tailed training data. Therefore, approaches that improve the accuracy - group robustness trade-off frontier of a DNN model (i.e. improving worst-group accuracy without sacrificing average accuracy, or vice versa) is of crucial importance. Uncertainty-based active learning (AL) can potentially improve the frontier by preferentially sampling underrepresented subgroups to create a more balanced training dataset. However, the quality of uncertainty estimates from modern DNNs tend to degrade in the presence of spurious correlations and dataset bias, compromising the effectiveness of AL for sampling tail groups. In this work, we propose Introspective Self-play (ISP), a simple approach to improve the uncertainty estimation of a deep neural network under dataset bias, by adding an auxiliary introspection task requiring a model to predict the bias for each data point in addition to the label. We show that ISP provably improves the bias-awareness of the model representation and the resulting uncertainty estimates. On two real-world tabular and language tasks,ISP serves as a simple “plug-in” for AL model training, consistently improving both the …
[ MH1-2-3-4 ]

We consider the estimation of average and counterfactual treatment effects, under two settings: back-door adjustment and front-door adjustment. The goal in both cases is to recover the treatment effect without having an access to a hidden confounder. This objective is attained by first estimating the conditional mean of the desired outcome variable given relevant covariates (the first stage" regression), and then taking the (conditional) expectation of this function as asecond stage" procedure. We propose to compute these conditional expectations directly using a regression function to the learned input features of the first stage, thus avoiding the need for sampling or density estimation. All functions and features (and in particular, the output features in the second stage) are neural networks learned adaptively from data, with the sole requirement that the final layer of the first stage should be linear. The proposed method is shown to converge to the true causal parameter, and outperforms the recent state-of-the-art methods on challenging causal benchmarks, including settings involving high-dimensional image data.
[ MH1-2-3-4 ]
Diffusion models have recently outperformed alternative approaches to model the distribution of natural images. Such diffusion models allow for deterministic sampling via the probability flow ODE, giving rise to a latent space and an encoder map. While having important practical applications, such as the estimation of the likelihood, the theoretical properties of this map are not yet fully understood. In the present work, we partially address this question for the popular case of the VP-SDE (DDPM) approach. We show that, perhaps surprisingly, the DDPM encoder map coincides with the optimal transport map for common distributions; we support this claim by extensive numerical experiments using advanced tensor train solver for multidimensional Fokker-Planck equation. We provide additional theoretical evidence for the case of multivariate normal distributions.
[ MH1-2-3-4 ]

In the era of deep learning, transferring information from a pretrained network to a downstream task by finetuning has many benefits. The choice of task head plays an important role in fine-tuning, as the pretrained and downstream tasks are usually different. Although there exist many different designs for finetuning, a full understanding of when and why these algorithms work has been elusive. We analyze how the choice of task head controls feature adaptation and hence influences the downstream performance. By decomposing the feature's learning dynamics, we find the key aspect is the training accuracy and loss at the beginning of finetuning, which determines the "energy" available for the feature's adaptation. We identify a significant trend in the effect of changes in this initial energy on the resulting features after finetuning. Specifically, as the energy increases, the Euclidean and cosine distances between the resulting and original features increase, while their dot product (and the resulting features’ norm) first increases and then decreases. Inspired by this, we give several practical principles that lead to better downstream performance. We analytically prove this trend in an overparamterized linear setting and verify its applicability to different experimental settings.
[ MH1-2-3-4 ]
We introduce GLM-130B, a bilingual (English and Chinese) pre-trained language model with 130 billion parameters. It is an attempt to open-source a 100B-scale model as good as GPT-3 (davinci) and unveil how models of such a scale can be successfully pre-trained. Over the course of this effort, we face numerous unexpected technical and engineering challenges, particularly on loss spikes and divergence. In this paper, we introduce the pre-training process of GLM-130B including its design choices, training strategies for both efficiency and stability, and engineering efforts. The resultant GLM-130B model offers significant outperformance over GPT-3 175B on a wide range of popular English benchmarks while the performance advantage is not observed in OPT-175B and BLOOM-176B. It also consistently and significantly outperforms ERNIE TITAN 3.0 260B—the largest Chinese language model—across related benchmarks. Finally, we leverage a unique scaling property of GLM-130B to reach INT4 quantization with almost no performance loss, making it the first among 100B-scale models and more importantly, allowing its effective inference on 4×RTX 3090 (24G) or 8×RTX 2080 Ti (11G) GPUs, the most ever affordable GPUs required for using 100B-scale models. The GLM-130B model weights are publicly accessible and its code, training logs, related toolkit, and lessons learned are …
[ MH1-2-3-4 ]

Deep neural networks have shown excellent prospects in speech separation tasks. However, obtaining good results while keeping a low model complexity remains challenging in real-world applications. In this paper, we provide a bio-inspired efficient encoder-decoder architecture by mimicking the brain’s top-down attention, called TDANet, with decreased model complexity without sacrificing performance. The top-down attention in TDANet is extracted by the global attention (GA) module and the cascaded local attention (LA) layers. The GA module takes multi-scale acoustic features as input to extract global attention signal, which then modulates features of different scales by direct top-down connections. The LA layers use features of adjacent layers as input to extract the local attention signal, which is used to modulate the lateral input in a top-down manner. On three benchmark datasets, TDANet consistently achieved competitive separation performance to previous state-of-the-art (SOTA) methods with higher efficiency. Specifically, TDANet’s multiply-accumulate operations (MACs) are only 5% of Sepformer, one of the previous SOTA models, and CPU inference time is only 10% of Sepformer. In addition, a large-size version of TDANet obtained SOTA results on three datasets, with MACs still only 10% of Sepformer and the CPU inference time only 24% of Sepformer. Our study suggests that …
[ MH1-2-3-4 ]
When trained on language data, do transformers learn some arbitrary computation that utilizes the full capacity of the architecture or do they learn a simpler, tree-like computation, hypothesized to underlie compositional meaning systems like human languages? There is an apparent tension between compositional accounts of human language understanding, which are based on a restricted bottom-up computational process, and the enormous success of neural models like transformers, which can route information arbitrarily between different parts of their input. One possibility is that these models, while extremely flexible in principle, in practice learn to interpret language hierarchically, ultimately building sentence representations close to those predictable by a bottom-up, tree-structured model. To evaluate this possibility, we describe an unsupervised and parameter-free method to \emph{functionally project} the behavior of any transformer into the space of tree-structured networks. Given an input sentence, we produce a binary tree that approximates the transformer's representation-building process and a score that captures how ``tree-like'' the transformer's behavior is on the input. While calculation of this score does not require training any additional models, it provably upper-bounds the fit between a transformer and any tree-structured approximation. Using this method, we show that transformers for three different tasks become more tree-like …
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]
In this work, we present CogVideo, a 9B-parameter transformer for text-to-video generation. The CogVideo model has been trained by inheriting a pretrained text-to-image model, CogView2, which significantly reduces the training cost and alleviates the problem of scarcity and weak relevance. We also propose a multi-frame-rate training strategy for better aligning text and video clips. CogVideo achieves state-of-the-art performance in machine evaluation and outperforms publicly available models by a large margin in human evaluation. Its codes and model are also publicly available at https://github.com/THUDM/CogVideo.
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]

Physically-based rendering (PBR) is key for immersive rendering effects used widely in the industry to showcase detailed realistic scenes from computer graphics assets. A well-known caveat is that producing the same is computationally heavy and relies on complex capture devices. Inspired by the success in quality and efficiency of recent volumetric neural rendering, we want to develop a physically-based neural shader to eliminate device dependency and significantly boost performance. However, no existing lighting and material models in the current neural rendering approaches can accurately represent the comprehensive lighting models and BRDFs properties required by the PBR process. Thus, this paper proposes a novel lighting representation that models direct and indirect light locally through a light sampling strategy in a learned light sampling field. We also propose BRDF models to separately represent surface/subsurface scattering details to enable complex objects such as translucent material (i.e., skin, jade). We then implement our proposed representations with an end-to-end physically-based neural face skin shader, which takes a standard face asset (i.e., geometry, albedo map, and normal map) and an HDRI for illumination as inputs and generates a photo-realistic rendering as output. Extensive experiments showcase the quality and efficiency of our PBR face skin shader, indicating …
[ MH1-2-3-4 ]
Sequence generation applications require satisfying semantic constraints, such as ensuring that programs are correct, using certain keywords, or avoiding undesirable content. Language models, whether fine-tuned or prompted with few-shot demonstrations, frequently violate these constraints, and lack a mechanism to iteratively revise their outputs. Moreover, some powerful language models are of extreme scale or inaccessible, making it inefficient, if not infeasible, to update their parameters for task-specific adaptation. We present Self-Correction, an approach that decouples an imperfect base generator (an off-the-shelf language model or supervised sequence-to-sequence model) from a separate corrector that learns to iteratively correct imperfect generations. To train the corrector, we propose an online training procedure that can use either scalar or natural language feedback on intermediate imperfect generations. We show that Self-Correction improves upon the base generator in three diverse generation tasks - mathematical program synthesis, lexically-constrained generation, and toxicity control - even when the corrector is much smaller than the base generator.
[ MH1-2-3-4 ]

Over the past few years afterward the birth of ResNet, skip connection has become the defacto standard for the design of modern architectures due to its widespread adoption, easy optimization, and proven performance.Prior work has explained the effectiveness of the skip connection mechanism from different perspectives.In this work, we deep dive into the model's behaviors with skip connections which can be formulated as a learnable Markov chain.An efficient Markov chain is preferred as it always maps the input data to the target domain in a better way.However, while a model is explained as a Markov chain, it is not guaranteed to be optimized following an efficient Markov chain by existing SGD-based optimizers prone to getting trapped in local optimal points.In order to move towards a more efficient Markov chain, we propose a simple routine of penal connection to make any residual-like model become a learnable Markov chain.Aside from that, the penal connection can also be viewed as a particular model regularization and can be easily implemented with one line of code in the most popular deep learning frameworks. The encouraging experimental results in multi-modal translation and image recognition empirically confirm our conjecture of the learnable Markov chain view and demonstrate …
[ MH1-2-3-4 ]
Equipping predicted segmentation with calibrated uncertainty is essential for safety-critical applications. In this work, we focus on capturing the data-inherent uncertainty (aka aleatoric uncertainty) in segmentation, typically when ambiguities exist in input images. Due to the high-dimensional output space and potential multiple modes in segmenting ambiguous images, it remains challenging to predict well-calibrated uncertainty for segmentation. To tackle this problem, we propose a novel mixture of stochastic experts (MoSE) model, where each expert network estimates a distinct mode of the aleatoric uncertainty and a gating network predicts the probabilities of an input image being segmented in those modes. This yields an efficient two-level uncertainty representation. To learn the model, we develop a Wasserstein-like loss that directly minimizes the distribution distance between the MoSE and ground truth annotations. The loss can easily integrate traditional segmentation quality measures and be efficiently optimized via constraint relaxation. We validate our method on the LIDC-IDRI dataset and a modified multimodal Cityscapes dataset. Results demonstrate that our method achieves the state-of-the-art or competitive performance on all metrics.
[ MH1-2-3-4 ]
In this paper, we study how to use masked signal modeling in vision and language (V+L) representation learning. Instead of developing masked language modeling (MLM) and masked image modeling (MIM) independently, we propose to build joint masked vision and language modeling, where the masked signal of one modality is reconstructed with the help from another modality. This is motivated by the nature of image-text paired data that both of the image and the text convey almost the same information but in different formats. The masked signal reconstruction of one modality conditioned on another modality can also implicitly learn cross-modal alignment between language tokens and image patches. Our experiments on various V+L tasks show that the proposed method, along with common V+L alignment losses, not only achieves state-of-the-art performance by using a large amount of data but also outperforms the other competitors by a significant margin in the regimes of limited training data.
[ MH1-2-3-4 ]

While GNN explanation has recently received significant attention, existing works are consistently designed for static graphs. Due to the prevalence of temporal graphs, many temporal graph models have been proposed, but explaining their predictions remains to be explored. To bridge the gap, in this paper, we propose T-GNNExplainer for temporal graph model explanation. Specifically, we regard a temporal graph constituted by a sequence of temporal events. Given a target event, our task is to find a subset of previously occurred events that lead to the model's prediction for it. To handle this combinatorial optimization problem, T-GNNExplainer includes an explorer to find the event subsets with Monte Carlo Tree Search (MCTS) and a navigator that learns the correlations between events and helps reduce the search space. In particular, the navigator is trained in advance and then integrated with the explorer to speed up searching and achieve better results. To the best of our knowledge, T-GNNExplainer is the first explainer tailored for temporal graph models. We conduct extensive experiments to evaluate the performance of T-GNNExplainer. Experimental results on both real-world and synthetic datasets demonstrate that T-GNNExplainer can achieve superior performance with up to about 50% improvement in Area under Fidelity-Sparsity Curve.
[ MH1-2-3-4 ]
Many recent works have shown trainability plays a central role in neural network pruning -- unattended broken trainability can lead to severe under-performance and unintentionally amplify the effect of retraining learning rate, resulting in biased (or even misinterpreted) benchmark results. This paper introduces trainability preserving pruning (TPP), a scalable method to preserve network trainability against pruning, aiming for improved pruning performance and being more robust to retraining hyper-parameters (e.g., learning rate). Specifically, we propose to penalize the gram matrix of convolutional filters to decorrelate the pruned filters from the retained filters. In addition to the convolutional layers, per the spirit of preserving the trainability of the whole network, we also propose to regularize the batch normalization parameters (scale and bias). Empirical studies on linear MLP networks show that TPP can perform on par with the oracle trainability recovery scheme. On nonlinear ConvNets (ResNet56/VGG19) on CIFAR10/100, TPP outperforms the other counterpart approaches by an obvious margin. Moreover, results on ImageNet-1K with ResNets suggest that TPP consistently performs more favorably against other top-performing structured pruning approaches. Code: https://github.com/MingSun-Tse/TPP.
[ MH1-2-3-4 ]
Sparse Neural Networks (SNNs) have received voluminous attention predominantly due to growing computational and memory footprints of consistently exploding parameter count in large-scale models. Similar to their dense counterparts, recent SNNs generalize just as well and are equipped with numerous favorable benefits (e.g., low complexity, high scalability, and robustness), sometimes even better than the original dense networks. As research effort is focused on developing increasingly sophisticated sparse algorithms, it is startling that a comprehensive benchmark to evaluate the effectiveness of these algorithms has been highly overlooked. In absence of a carefully crafted evaluation benchmark, most if not all, sparse algorithms are evaluated against fairly simple and naive tasks (eg. CIFAR-10/100, ImageNet, GLUE, etc.), which can potentially camouflage many advantages as well unexpected predicaments of SNNs. In pursuit of a more general evaluation and unveiling the true potential of sparse algorithms, we introduce “Sparsity May Cry” Benchmark (SMC-Bench), a collection of carefully-curated 4 diverse tasks with 10 datasets, that accounts for capturing a wide range of domain-specific and sophisticated knowledge. Our systemic evaluation of the most representative sparse algorithms reveals an important obscured observation: the state-of-the-art magnitude- and/or gradient-based sparse algorithms seemingly fail to perform on SMC-Bench when applied out-of-the-box, sometimes …
[ MH1-2-3-4 ]
Reliable generalization lies at the heart of safe ML and AI. However, understanding when and how neural networks generalize remains one of the most important unsolved problems in the field. In this work, we conduct an extensive empirical study (20'910 models, 15 tasks) to investigate whether insights from the theory of computation can predict the limits of neural network generalization in practice. We demonstrate that grouping tasks according to the Chomsky hierarchy allows us to forecast whether certain architectures will be able to generalize to out-of-distribution inputs. This includes negative results where even extensive amounts of data and training time never lead to any non-trivial generalization, despite models having sufficient capacity to fit the training data perfectly. Our results show that, for our subset of tasks, RNNs and Transformers fail to generalize on non-regular tasks, LSTMs can solve regular and counter-language tasks, and only networks augmented with structured memory (such as a stack or memory tape) can successfully generalize on context-free and context-sensitive tasks.
[ MH1-2-3-4 ]
The design choices in the Transformer attention mechanism, including weak inductive bias and quadratic computational complexity, have limited its application for modeling long sequences. In this paper, we introduce Mega, a simple, theoretically grounded, single-head gated attention mechanism equipped with (exponential) moving average to incorporate inductive bias of position-aware local dependencies into the position-agnostic attention mechanism. We further propose a variant of Mega that offers linear time and space complexity yet yields only minimal quality loss, by efficiently splitting the whole sequence into multiple chunks with fixed length. Extensive experiments on a wide range of sequence modeling benchmarks, including the Long Range Arena, neural machine translation, auto-regressive language modeling, and image and speech classification, show that Mega achieves significant improvements over other sequence models, including variants of Transformers and recent state space models.
[ MH1-2-3-4 ]
Incorporating second-order gradient information (curvature) into optimization can dramatically reduce the number of iterations required to train machine learning models. In natural gradient descent, such information comes from the Fisher information matrix which yields a number of desirable properties. As exact natural gradient updates are intractable for large models, successful methods such as KFAC and sequels approximate the Fisher in a structured form that can easily be inverted. However, this requires model/layer-specific tensor algebra and certain approximations that are often difficult to justify. Here, we use ideas from Legendre-Fenchel duality to learn a direct and efficiently evaluated model for the product of the inverse Fisher with any vector, in an online manner, leading to natural gradient steps that get progressively more accurate over time despite noisy gradients. We prove that the resulting “Fisher-Legendre” (FishLeg) optimizer converges to a (global) minimum of non-convex functions satisfying the PL condition, which applies in particular to deep linear networks. On standard auto-encoder benchmarks, we show empirically that FishLeg outperforms standard first-order optimization methods, and performs on par with or better than other second-order methods, especially when using small batches. Thanks to its generality, we expect our approach to facilitate the handling of a variety …
[ MH1-2-3-4 ]
Distillation-aware Neural Architecture Search (DaNAS) aims to search for an optimal student architecture that obtains the best performance and/or efficiency when distilling the knowledge from a given teacher model. Previous DaNAS methods have mostly tackled the search for the neural architecture for fixed datasets and the teacher, which are not generalized well on a new task consisting of an unseen dataset and an unseen teacher, thus need to perform a costly search for any new combination of the datasets and the teachers. For standard NAS tasks without KD, meta-learning-based computationally efficient NAS methods have been proposed, which learn the generalized search process over multiple tasks (datasets) and transfer the knowledge obtained over those tasks to a new task. However, since they assume learning from scratch without KD from a teacher, they might not be ideal for DaNAS scenarios. To eliminate the excessive computational cost of DaNAS methods and the sub-optimality of rapid NAS methods, we propose a distillation-aware meta-accuracy prediction model, DaSS (Distillation-aware Student Search), which can predict a given architecture's final performances on a dataset when performing KD with a given teacher, without having actually to train it on the target task. The experimental results demonstrate that our proposed …
[ MH1-2-3-4 ]

We study whether automatically-induced prompts that effectively extract information from a language model can also be used, out-of-the-box, to probe other language models for the same information. After confirming that discrete prompts induced with the AutoPrompt algorithm outperform manual and semi-manual prompts on the slot-filling task, we demonstrate a drop in performance for AutoPrompt prompts learned on a model and tested on another. We introduce a way to induce prompts by mixing language models at training time that results in prompts that generalize well across models. We conduct an extensive analysis of the induced prompts, finding that the more general prompts include a larger proportion of existing English words and have a less order-dependent and more uniform distribution of information across their component tokens. Our work provides preliminary evidence that it's possible to generate discrete prompts that can be induced once and used with a number of different models, and gives insights on the properties characterizing such prompts.
[ MH1-2-3-4 ]
We introduce Token Merging (ToMe), a simple method to increase the throughput of existing ViT models without needing to train. ToMe gradually combines similar tokens in a transformer using a general and light-weight matching algorithm that is as fast as pruning while being more accurate. Off-the-shelf, ToMe can 2x the throughput of state-of-the-art ViT-L @ 512 and ViT-H @ 518 models on images and 2.2x the throughput of ViT-L on video with only a 0.2-0.3% accuracy drop in each case. ToMe can also easily be applied during training, improving in practice training speed up to 2x for MAE fine-tuning on video. Training with ToMe further minimizes accuracy drop, leading to 2x the throughput of ViT-B on audio for only a 0.4% mAP drop. Qualitatively, we find that ToMe merges object parts into one token, even over multiple frames of video. Overall, ToMe’s accuracy and speed are competitive with state-of-the-art on images, video, and audio.
[ MH1-2-3-4 ]
Tensor decompositions have been successfully applied to compress neural networks. The compression algorithms using tensor decompositions commonly minimize the approximation error on the weights. Recent work assumes the approximation error on the weights is a proxy for the performance of the model to compress multiple layers and fine-tune the compressed model. Surprisingly, little research has systematically evaluated which approximation errors can be used to make choices regarding the layer, tensor decomposition method, and level of compression. To close this gap, we perform an experimental study to test if this assumption holds across different layers and types of decompositions, and what the effect of fine-tuning is. We include the approximation error on the features resulting from a compressed layer in our analysis to test if this provides a better proxy, as it explicitly takes the data into account. We find the approximation error on the weights has a positive correlation with the performance error, before as well as after fine-tuning. Basing the approximation error on the features does not improve the correlation significantly. While scaling the approximation error commonly is used to account for the different sizes of layers, the average correlation across layers is smaller than across all choices (i.e. …
[ MH1-2-3-4 ]
We present a smoothly broken power law functional form (referred to by us as a broken neural scaling law (BNSL)) that accurately models and extrapolates the scaling behaviors of deep neural networks (i.e. how the evaluation metric of interest varies as the amount of compute used for training, number of model parameters, training dataset size, or upstream performance varies) for various architectures and for each of various tasks within a large and diverse set of upstream and downstream tasks, in zero-shot, prompted, and fine-tuned settings. This set includes large-scale vision, language, audio, video, diffusion, generative modeling, multimodal learning, contrastive learning, AI alignment, robotics, out-of-distribution (OOD) generalization, continual learning, uncertainty estimation / calibration, out-of-distribution detection, adversarial robustness, molecules, computer programming/coding, math word problems, arithmetic, unsupervised/self-supervised learning, and reinforcement learning (single agent and multi-agent). When compared to other functional forms for neural scaling behavior, this functional form yields extrapolations of scaling behavior that are considerably more accurate on this set. Moreover, this functional form accurately models and extrapolates scaling behavior that other functional forms are incapable of expressing such as the non-monotonic transitions present in the scaling behavior of phenomena such as double descent and the delayed, sharp inflection points present in …
[ MH1-2-3-4 ]
Neuro-symbolic learning generally consists of two separated worlds, i.e., neural network training and symbolic constraint solving, whose success hinges on symbol grounding, a fundamental problem in AI. This paper presents a novel, softened symbol grounding process, bridging the gap between the two worlds, and resulting in an effective and efficient neuro-symbolic learning framework. Technically, the framework features (1) modeling of symbol solution states as a Boltzmann distribution, which avoids expensive state searching and facilitates mutually beneficial interactions between network training and symbolic reasoning; (2) a new MCMC technique leveraging projection and SMT solvers, which efficiently samples from disconnected symbol solution spaces; (3) an annealing mechanism that can escape from sub-optimal symbol groundings. Experiments with three representative neuro-symbolic learning tasks demonstrate that, owing to its superior symbol grounding capability, our framework successfully solves problems well beyond the frontier of the existing proposals.
[ MH1-2-3-4 ]
Continuous-time (CT) modeling has proven to provide improved sample efficiency and interpretability in learning the dynamical behavior of physical systems compared to discrete-time (DT) models. However, even with numerous recent developments, the CT nonlinear state-space (NL-SS) model identification problem remains to be solved in full, considering common experimental aspects such as the presence of external inputs, measurement noise, latent states, and general robustness. This paper presents a novel estimation method that addresses all these aspects and that can obtain state-of-the-art results on multiple benchmarks with compact fully connected neural networks capturing the CT dynamics. The proposed estimation method called the subspace encoder approach (SUBNET) ascertains these results by efficiently approximating the complete simulation loss by evaluating short simulations on subsections of the data, by using an encoder function to estimate the initial state for each subsection and a novel state-derivative normalization to ensure stability and good numerical conditioning of the training process. We prove that the use of subsections increases cost function smoothness together with the necessary requirements for the existence of the encoder function and we show that the proposed state-derivative normalization is essential for reliable estimation of CT NL-SS models.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]

We propose a Variational AutoEncoder (VAE) for Transformers by developing a Variational Information Bottleneck (VIB) regulariser for Transformer embeddings. We formalise such attention-based representations as mixture distributions, and use Bayesian nonparametrics to develop a Nonparametric VIB (NVIB) for them. The variable number of mixture components supported by nonparametrics captures the variable number of vectors supported by attention, and exchangeable distributions from nonparametrics capture the permutation invariance of attention. Our Transformer VAE (NVAE) uses NVIB to regularise the information passing from the Transformer encoder to the Transformer decoder. Evaluations of a NVAE, trained on natural language text, demonstrate that NVIB can regularise the number of mixture components in the induced embedding whilst maintaining generation quality and reconstruction capacity.
[ MH1-2-3-4 ]
More and more evidence has shown that strengthening layer interactions can enhance the representation power of a deep neural network, while self-attention excels at learning interdependencies by retrieving query-activated information. Motivated by this, we devise a cross-layer attention mechanism, called multi-head recurrent layer attention (MRLA), that sends a query representation of the current layer to all previous layers to retrieve query-related information from different levels of receptive fields. A light-weighted version of MRLA is also proposed to reduce the quadratic computation cost. The proposed layer attention mechanism can enrich the representation power of many state-of-the-art vision networks, including CNNs and vision transformers. Its effectiveness has been extensively evaluated in image classification, object detection and instance segmentation tasks, where improvements can be consistently observed. For example, our MRLA can improve 1.6% Top-1 accuracy on ResNet-50, while only introducing 0.16M parameters and 0.07B FLOPs. Surprisingly, it can boost the performances by a large margin of 3-4% box AP and mask AP in dense prediction tasks. Our code is available at https://github.com/joyfang1106/MRLA.
[ MH1-2-3-4 ]
Empirical studies suggest that machine learning models trained with empirical risk minimization (ERM) often rely on attributes that may be spuriously correlated with the class labels. Such models typically lead to poor performance during inference for data lacking such correlations. In this work, we explicitly consider a situation where potential spurious correlations are present in the majority of training data. In contrast with existing approaches, which use the ERM model outputs to detect the samples without spurious correlations and either heuristically upweight or upsample those samples, we propose the logit correction (LC) loss, a simple yet effective improvement on the softmax cross-entropy loss, to correct the sample logit. We demonstrate that minimizing the LC loss is equivalent to maximizing the group-balanced accuracy, so the proposed LC could mitigate the negative impacts of spurious correlations. Our extensive experimental results further reveal that the proposed LC loss outperforms state-of-the-art solutions on multiple popular benchmarks by a large margin, an average 5.5% absolute improvement, without access to spurious attribute labels. LC is also competitive with oracle methods that make use of the attribute labels.
[ MH1-2-3-4 ]
The performance of deep neural networks is strongly influenced by the training dataset setup. In particular, when attributes with a strong correlation with the target attribute are present, the trained model can provide unintended prejudgments and show significant inference errors (i.e., the dataset bias problem). Various methods have been proposed to mitigate dataset bias, and their emphasis is on weakly correlated samples, called bias-conflicting samples. These methods are based on explicit bias labels provided by humans. However, such methods require human costs. Recently, several studies have sought to reduce human intervention by utilizing the output space values of neural networks, such as feature space, logits, loss, or accuracy. However, these output space values may be insufficient for the model to understand the bias attributes well. In this study, we propose a debiasing algorithm leveraging gradient called Per-sample Gradient-based Debiasing (PGD). PGD is comprised of three steps: (1) training a model on uniform batch sampling, (2) setting the importance of each sample in proportion to the norm of the sample gradient, and (3) training the model using importance-batch sampling, whose probability is obtained in step (2). Compared with existing baselines for various datasets, the proposed method showed state-of-the-art accuracy for the …
[ MH1-2-3-4 ]
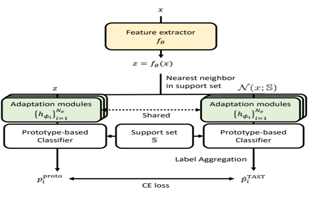
Test-time adaptation (TTA) aims to adapt a trained classifier using online unlabeled test data only, without any information related to the training procedure. Most existing TTA methods adapt the trained classifier using the classifier's prediction on the test data as pseudo-label.However, under test-time domain shift, accuracy of the pseudo labels cannot be guaranteed, and thus the TTA methods often encounter performance degradation at the adapted classifier. To overcome this limitation, we propose a novel test-time adaptation method, called Test-time Adaptation via Self-Training with nearest neighbor information (TAST), which is composed of the following procedures: (1) adds trainable adaptation modules on top of the trained feature extractor; (2) newly defines a pseudo-label distribution for the test data by using the nearest neighbor information; (3) trains these modules only a few times during test time to match the nearest neighbor-based pseudo label distribution and a prototype-based class distribution for the test data; and (4) predicts the label of test data using the average predicted class distribution from these modules. The pseudo-label generation is based on the basic intuition that a test data and its nearest neighbor in the embedding space are likely to share the same label under the domain shift. By …
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Recent empirical studies on domain generalization (DG) have shown that DG algorithms that perform well on some distribution shifts fail on others, and no state-of-the-art DG algorithm performs consistently well on all shifts. Moreover, real-world data often has multiple distribution shifts over different attributes; hence we introduce multi-attribute distribution shift datasets and find that the accuracy of existing DG algorithms falls even further. To explain these results, we provide a formal characterization of generalization under multi-attribute shifts using a canonical causal graph. Based on the relationship between spurious attributes and the classification label, we obtain realizations of the canonical causal graph that characterize common distribution shifts and show that each shift entails different independence constraints over observed variables. As a result, we prove that any algorithm based on a single, fixed constraint cannot work well across all shifts, providing theoretical evidence for mixed empirical results on DG algorithms. Based on this insight, we develop Causally Adaptive Constraint Minimization (CACM), an algorithm that uses knowledge about the data-generating process to adaptively identify and apply the correct independence constraints for regularization. Results on fully synthetic, MNIST, small NORB, and Waterbirds datasets, covering binary and multi-valued attributes and labels, show that adaptive dataset-dependent …
[ MH1-2-3-4 ]
Domain Adaptation of Black-box Predictors (DABP) aims to learn a model on an unlabeled target domain supervised by a black-box predictor trained on a source domain. It does not require access to both the source-domain data and the predictor parameters, thus addressing the data privacy and portability issues of standard domain adaptation methods. Existing DABP approaches mostly rely on knowledge distillation (KD) from the black-box predictor, i.e., training the model with its noisy target-domain predictions, which however inevitably introduces the confirmation bias accumulated from the prediction noises and leads to degrading performance. To mitigate such bias, we propose a new strategy, \textit{divide-to-adapt}, that purifies cross-domain knowledge distillation by proper domain division. This is inspired by an observation we make for the first time in domain adaptation: the target domain usually contains easy-to-adapt and hard-to-adapt samples that have different levels of domain discrepancy w.r.t. the source domain, and deep models tend to fit easy-to-adapt samples first. Leveraging easy-to-adapt samples with less noise can help KD alleviate the negative effect of prediction noises from black-box predictors. In this sense, the target domain can be divided into an easy-to-adapt subdomain with less noise and a hard-to-adapt subdomain at the early stage of training. …
[ MH1-2-3-4 ]
Limited progress has been made in continual unsupervised learning of representations, especially in reusing, expanding, and continually disentangling learned semantic factors across data environments. We argue that this is because existing approaches treat continually-arrived data independently, without considering how they are related based on the underlying semantic factors. We address this by a new generative model describing a topologically-connected mixture of spike-and-slab distributions in the latent space, learned end-to-end in a continual fashion via principled variational inference. The learned mixture is able to automatically discover the active semantic factors underlying each data environment and to accumulate their relational structure based on that. This distilled knowledge of different data environments can further be used for generative replay and guiding continual disentangling of new semantic factors. We tested the presented method on a split version of 3DShapes to provide the first quantitative disentanglement evaluation of continually learned representations, and further demonstrated its ability to continually disentangle new representations in benchmark datasets.
[ MH1-2-3-4 ]
Changing how pre-trained models behave---e.g., improving their performance on a downstream task or mitigating biases learned during pre-training---is a common practice when developing machine learning systems. In this work, we propose a new paradigm for steering the behavior of neural networks, centered around task vectors. A task vector specifies a direction in the weight space of a pre-trained model, such that movement in that direction improves performance on the task. We build task vectors by subtracting the weights of a pre-trained model from the weights of the same model after fine-tuning on a task. We show that these task vectors can be modified and combined together through arithmetic operations such as negation and addition, and the behavior of the resulting model is steered accordingly. Moreover, task vectors can be added together to improve performance on multiple tasks at once. Finally, when tasks are linked by an analogy relationship of the form ``A is to B as C is to D", combining task vectors from three of the tasks can improve performance on the fourth, even when no data from the fourth task is used for training.
[ MH1-2-3-4 ]
Partitioning a set of elements into subsets of a priori unknown sizes is essential in many applications. These subset sizes are rarely explicitly learned - be it the cluster sizes in clustering applications or the number of shared versus independent generative latent factors in weakly-supervised learning. Probability distributions over correct combinations of subset sizes are non-differentiable due to hard constraints, which prohibit gradient-based optimization. In this work, we propose the differentiable hypergeometric distribution. The hypergeometric distribution models the probability of different group sizes based on their relative importance. We introduce reparameterizable gradients to learn the importance between groups and highlight the advantage of explicitly learning the size of subsets in two typical applications: weakly-supervised learning and clustering. In both applications, we outperform previous approaches, which rely on suboptimal heuristics to model the unknown size of groups.
[ MH1-2-3-4 ]

Learning effective representations simultaneously from multiple tasks in a unified network framework is a fundamental paradigm for multi-task dense visual scene understanding. This requires joint modeling (i) task-generic and (ii) task-specific representations, and (iii) cross-task representation interactions. Existing works typically model these three perspectives with separately designed structures, using shared network modules for task-generic learning, different modules for task-specific learning, and establishing connections among these components for cross-task interactions. It is barely explored in the literature to model these three perspectives in each network layer in an end-to-end manner, which can not only minimize the effort of carefully designing empirical structures for the three multi-task representation learning objectives, but also greatly improve the representation learning capability of the multi-task network since all the model capacity will be used to optimize the three objectives together. In this paper, we propose TaskPrompter, a novel spatial-channel multi-task prompting transformer framework to achieve this target. Specifically, we design a set of spatial-channel task prompts and learn their spatial- and channel interactions with the shared image tokens in each transformer layer with attention mechanism, as aggregating spatial and channel information is critical for dense prediction tasks. Each task prompt learns task-specific representation for one task, …
[ MH1-2-3-4 ]
We tackle the problem of Selective Classification where the objective is to achieve the best performance on a predetermined ratio (coverage) of the dataset. Recent state-of-the-art selective methods come with architectural changes either via introducing a separate selection head or an extra abstention logit. In this paper, we challenge the aforementioned methods. The results suggest that the superior performance of state-of-the-art methods is owed to training a more generalizable classifier rather than their proposed selection mechanisms. We argue that the best performing selection mechanism should instead be rooted in the classifier itself. Our proposed selection strategy uses the classification scores and achieves better results by a significant margin, consistently, across all coverages and all datasets, without any added compute cost. Furthermore, inspired by semi-supervised learning, we propose an entropy-based regularizer that improves the performance of selective classification methods. Our proposed selection mechanism with the proposed entropy-based regularizer achieves new state-of-the-art results.
[ MH1-2-3-4 ]
We study the problem of self-supervised structured representation learning using autoencoders for downstream tasks such as generative modeling. Unlike most methods which rely on matching an arbitrary, relatively unstructured, prior distribution for sampling, we propose a sampling technique that relies solely on the independence of latent variables, thereby avoiding the trade-off between reconstruction quality and generative performance typically observed in VAEs. We design a novel autoencoder architecture capable of learning a structured representation without the need for aggressive regularization. Our structural decoders learn a hierarchy of latent variables, thereby ordering the information without any additional regularization or supervision. We demonstrate how these models learn a representation that improves results in a variety of downstream tasks including generation, disentanglement, and extrapolation using several challenging and natural image datasets.
[ MH1-2-3-4 ]
This paper studies learning on text-attributed graphs (TAGs), where each node is associated with a text description. An ideal solution for such a problem would be integrating both the text and graph structure information with large language models and graph neural networks (GNNs). However, the problem becomes very challenging when graphs are large due to the high computational complexity brought by training large language models and GNNs together. In this paper, we propose an efficient and effective solution to learning on large text-attributed graphs by fusing graph structure and language learning with a variational Expectation-Maximization (EM) framework, called GLEM. Instead of simultaneously training large language models and GNNs on big graphs, GLEM proposes to alternatively update the two modules in the E-step and M-step. Such a procedure allows training the two modules separately while simultaneously allowing the two modules to interact and mutually enhance each other. Extensive experiments on multiple data sets demonstrate the efficiency and effectiveness of the proposed approach.
[ MH1-2-3-4 ]

This paper addresses learning end-to-end models for time series data that include a temporal alignment step via dynamic time warping (DTW). Existing approaches to differentiable DTW either differentiate through a fixed warping path or apply a differentiable relaxation to the min operator found in the recursive steps used to solve the DTW problem. We instead propose a DTW layer based around bi-level optimisation and deep declarative networks, which we name DecDTW. By formulating DTW as a continuous, inequality constrained optimisation problem, we can compute gradients for the solution of the optimal alignment (with respect to the underlying time series) using implicit differentiation. An interesting byproduct of this formulation is that DecDTW outputs the optimal warping path between two time series as opposed to a soft approximation, recoverable from Soft-DTW. We show that this property is particularly useful for applications where downstream loss functions are defined on the optimal alignment path itself. This naturally occurs, for instance, when learning to improve the accuracy of predicted alignments against ground truth alignments. We evaluate DecDTW on two such applications, namely the audio-to-score alignment task in music information retrieval and the visual place recognition task in robotics, demonstrating state-of-the-art results in both.
[ MH1-2-3-4 ]
We propose a new mechanism to augment a word vector embedding representation that offers improved bias removal while retaining the key information—resulting in improved interpretability of the representation. Rather than removing the information associated with a concept that may induce bias, our proposed method identifies two concept subspaces and makes them orthogonal. The resulting representation has these two concepts uncorrelated. Moreover, because they are orthogonal, one can simply apply a rotation on the basis of the representation so that the resulting subspace corresponds with coordinates. This explicit encoding of concepts to coordinates works because they have been made fully orthogonal, which previous approaches do not achieve. Furthermore, we show that this can be extended to multiple subspaces. As a result, one can choose a subset of concepts to be represented transparently and explicitly, while the others are retained in the mixed but extremely expressive format of the representation.
[ MH1-2-3-4 ]
Neural Representations have recently been shown to effectively reconstruct a wide range of signals from 3D meshes and shapes to images and videos. We show that, when adapted correctly, neural representations can be used to directly represent the weights of a pre-trained convolutional neural network, resulting in a Neural Representation for Neural Networks (NeRN). Inspired by coordinate inputs of previous neural representation methods, we assign a coordinate to each convolutional kernel in our network based on its position in the architecture, and optimize a predictor network to map coordinates to their corresponding weights. Similarly to the spatial smoothness of visual scenes, we show that incorporating a smoothness constraint over the original network's weights aids NeRN towards a better reconstruction. In addition, since slight perturbations in pre-trained model weights can result in a considerable accuracy loss, we employ techniques from the field of knowledge distillation to stabilize the learning process. We demonstrate the effectiveness of NeRN in reconstructing widely used architectures on CIFAR-10, CIFAR-100, and ImageNet. Finally, we present two applications using NeRN, demonstrating the capabilities of the learned representations.
[ MH1-2-3-4 ]
The fundamental challenge in causal induction is to infer the underlying graph structure given observational and/or interventional data. Most existing causal induction algorithms operate by generating candidate graphs and evaluating them using either score-based methods (including continuous optimization) or independence tests. In our work, we instead treat the inference process as a black box and design a neural network architecture that learns the mapping from both observational and interventional data to graph structures via supervised training on synthetic graphs. The learned model generalizes to new synthetic graphs, is robust to train-test distribution shifts, and achieves state-of-the-art performance on naturalistic graphs for low sample complexity.
[ MH1-2-3-4 ]
Inspired by Regularized Lottery Ticket Hypothesis, which states that competitive smooth (non-binary) subnetworks exist within a dense network, we propose a few-shot class-incremental learning method referred to as Soft-SubNetworks (SoftNet). Our objective is to learn a sequence of sessions incrementally, where each session only includes a few training instances per class while preserving the knowledge of the previously learned ones. SoftNet jointly learns the model weights and adaptive non-binary soft masks at a base training session in which each mask consists of the major and minor subnetwork; the former aims to minimize catastrophic forgetting during training, and the latter aims to avoid overfitting to a few samples in each new training session. We provide comprehensive empirical validations demonstrating that our SoftNet effectively tackles the few-shot incremental learning problem by surpassing the performance of state-of-the-art baselines over benchmark datasets.
[ MH1-2-3-4 ]
A core component of human intelligence is the ability to identify abstract patterns inherent in complex, high-dimensional perceptual data, as exemplified by visual reasoning tasks such as Raven’s Progressive Matrices (RPM). Motivated by the goal of designing AI systems with this capacity, recent work has focused on evaluating whether neural networks can learn to solve RPM-like problems. Previous work has generally found that strong performance on these problems requires the incorporation of inductive biases that are specific to the RPM problem format, raising the question of whether such models might be more broadly useful. Here, we investigated the extent to which a general-purpose mechanism for processing visual scenes in terms of objects might help promote abstract visual reasoning. We found that a simple model, consisting only of an object-centric encoder and a transformer reasoning module, achieved state-of-the-art results on both of two challenging RPM-like benchmarks (PGM and I-RAVEN), as well as a novel benchmark with greater visual complexity (CLEVR-Matrices). These results suggest that an inductive bias for object-centric processing may be a key component of abstract visual reasoning, obviating the need for problem-specific inductive biases.
[ MH1-2-3-4 ]
Intent detection with semantically similar fine-grained intents is a challenging task. To address it, we reformulate intent detection as a question-answering retrieval task by treating utterances and intent names as questions and answers. To that end, we utilize a question-answering retrieval architecture and adopt a two stages training schema with batch contrastive loss. In the pre-training stage, we improve query representations through self-supervised training. Then, in the fine-tuning stage, we increase contextualized token-level similarity scores between queries and answers from the same intent. Our results on three few-shot intent detection benchmarks achieve state-of-the-art performance.
[ MH1-2-3-4 ]

Many contrastive and meta-learning approaches learn representations by identifying common features in multiple views. However, the formalism for these approaches generally assumes features to be shared across views to be captured coherently. We consider the problem of learning a unified representation from partial observations, where useful features may be present in only some of the views. We approach this through a probabilistic formalism enabling views to map to representations with different levels of uncertainty in different components; these views can then be integrated with one another through marginalisation over that uncertainty. Our approach, Partial Observation Experts Modelling (POEM), then enables us to meta-learn consistent representations from partial observations. We evaluate our approach on an adaptation of a comprehensive few-shot learning benchmark, Meta-Dataset, and demonstrate the benefits of POEM over other meta-learning methods at representation learning from partial observations. We further demonstrate the utility of POEM by meta-learning to represent an environment from partial views observed by an agent exploring the environment.
[ MH1-2-3-4 ]
We propose a method for learning topology-preserving data representations (dimensionality reduction). The method aims to provide topological similarity between the data manifold and its latent representation via enforcing the similarity in topological features (clusters, loops, 2D voids, etc.) and their localization. The core of the method is the minimization of the Representation Topology Divergence (RTD) between original high-dimensional data and low-dimensional representation in latent space. RTD minimization provides closeness in topological features with strong theoretical guarantees. We develop a scheme for RTD differentiation and apply it as a loss term for the autoencoder. The proposed method "RTD-AE" better preserves the global structure and topology of the data manifold than state-of-the-art competitors as measured by linear correlation, triplet distance ranking accuracy, and Wasserstein distance between persistence barcodes.
[ MH1-2-3-4 ]
Uncovering rationales behind predictions of graph neural networks (GNNs) has received increasing attention over the years. Existing literature mainly focus on selecting a subgraph, through combinatorial optimization, to provide faithful explanations. However, the exponential size of candidate subgraphs limits the applicability of state-of-the-art methods to large-scale GNNs. We enhance on this through a different approach: by proposing a generative structure – GFlowNets-based GNN Explainer (GFlowExplainer), we turn the optimization problem into a step-by-step generative problem. Our GFlowExplainer aims to learn a policy that generates a distribution of subgraphs for which the probability of a subgraph is proportional to its’ reward. The proposed approach eliminates the influence of node sequence and thus does not need any pre-training strategies. We also propose a new cut vertex matrix to efficiently explore parent states for GFlowNets structure, thus making our approach applicable in a large-scale setting. We conduct extensive experiments on both synthetic and real datasets, and both qualitative and quantitative results show the superiority of our GFlowExplainer.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]

We introduce Joint Multidimensional Scaling, a novel approach for unsupervised manifold alignment, which maps datasets from two different domains, without any known correspondences between data instances across the datasets, to a common low-dimensional Euclidean space. Our approach integrates Multidimensional Scaling (MDS) and Wasserstein Procrustes analysis into a joint optimization problem to simultaneously generate isometric embeddings of data and learn correspondences between instances from two different datasets, while only requiring intra-dataset pairwise dissimilarities as input. This unique characteristic makes our approach applicable to datasets without access to the input features, such as solving the inexact graph matching problem. We propose an alternating optimization scheme to solve the problem that can fully benefit from the optimization techniques for MDS and Wasserstein Procrustes. We demonstrate the effectiveness of our approach in several applications, including joint visualization of two datasets, unsupervised heterogeneous domain adaptation, graph matching, and protein structure alignment. The implementation of our work is available at https://github.com/BorgwardtLab/JointMDS.
[ MH1-2-3-4 ]
In machine learning, we traditionally evaluate the performance of a single model, averaged over a collection of test inputs. In this work, we propose a new approach: we measure the performance of a collection of models when evaluated at single input point. Specifically, we study a point's profile: the relationship between models' average performance on the test distribution and their pointwise performance on this individual point. We find that profiles can yield new insights into the structure of both models and data---in and out-of-distribution. For example, we empirically show that real data distributions consist of points with qualitatively different profiles. On one hand, there are compatible'' points with strong correlation between the pointwise and average performance. On the other hand, there are points with weak and even *negative* correlation: cases where improving overall model accuracy actually *hurts* performance on these inputs. As an application, we use profiles to construct a dataset we call CIFAR-10-NEG: a subset of CINIC-10 such that for standard models, accuracy on CIFAR-10-NEG is *negatively correlated* with CIFAR-10 accuracy. Illustrating for the first time an OOD dataset that completely invertsaccuracy-on-the-line'' (Miller et al., 2021).
[ MH1-2-3-4 ]
The spontaneous exchange of turns is a central aspect of human communication. Although turn-taking conventions come to us naturally, artificial dialogue agents struggle to coordinate, and must rely on hard-coded rules to engage in interactive conversations with human interlocutors. In this paper, we investigate the conditions under which artificial agents may naturally develop turn-taking conventions in a simple language game. We describe a cooperative task where success is contingent on the exchange of information along a shared communication channel where talking over each other hinders communication. Despite these environmental constraints, neural-network based agents trained to solve this task with reinforcement learning do not systematically adopt turn-taking conventions. However, we find that agents that do agree on turn-taking protocols end up performing better. Moreover, agents that are forced to perform turn-taking can learn to solve the task more quickly. This suggests that turn-taking may help to generate conversations that are easier for speakers to interpret.
[ MH1-2-3-4 ]

Recent advances in the understanding of Generative Adversarial Networks (GANs) have led to remarkable progress in visual editing and synthesis tasks, capitalizing on the rich semantics that are embedded in the latent spaces of pre-trained GANs. However, existing methods are often tailored to specific GAN architectures and are limited to either discovering global semantic directions that do not facilitate localized control, or require some form of supervision through manually provided regions or segmentation masks. In this light, we present an architecture-agnostic approach that jointly discovers factors representing spatial parts and their appearances in an entirely unsupervised fashion. These factors are obtained by applying a semi-nonnegative tensor factorization on the feature maps, which in turn enables context-aware local image editing with pixel-level control. In addition, we show that the discovered appearance factors correspond to saliency maps that localize concepts of interest, without using any labels. Experiments on a wide range of GAN architectures and datasets show that, in comparison to the state of the art, our method is far more efficient in terms of training time and, most importantly, provides much more accurate localized control. Our code is available at: https://github.com/james-oldfield/PandA.
[ MH1-2-3-4 ]

Diffusion-based image translation guided by semantic texts or a single target image has enabled flexible style transfer which is not limited to the specific domains. Unfortunately, due to the stochastic nature of diffusion models, it is often difficult to maintain the original content of the image during the reverse diffusion.To address this, here we present a novel diffusion-based unsupervised image translation method, dubbed as DiffuseIT, using disentangled style and content representation. Specifically, inspired by the slicing Vision Transformer, we extract intermediate keys of multihead self attention layer from ViT model and used them as the content preservation loss. Then, an image guided style transfer is performed by matching the [CLS] classification token from the denoised samples and target image, whereas additional CLIP loss is used for the text-driven style transfer. To further accelerate the semantic change during the reverse diffusion, we also propose a novel semantic divergence loss and resampling strategy. Our experimental results show that the proposed method outperforms state-of-the-art baseline models in both text-guided and image-guided translation tasks.
[ MH1-2-3-4 ]
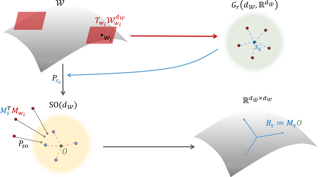
The ideally disentangled latent space in GAN involves the global representation of latent space using semantic attribute coordinates. In other words, in this disentangled space, there exists the global semantic basis as a vector space where each basis component describes one attribute of generated images. In this paper, we propose an unsupervised method for finding this global semantic basis in the intermediate latent space in GANs. This semantic basis represents sample-independent meaningful perturbations that change the same semantic attribute of an image on the entire latent space. The proposed global basis, called Fréchet basis, is derived by introducing Fréchet mean to the local semantic perturbations in a latent space. Fréchet basis is discovered in two stages. First, the global semantic subspace is discovered by the Fréchet mean in the Grassmannian manifold of the local semantic subspaces. Second, Fréchet basis is found by optimizing a basis of the semantic subspace via the Fréchet mean in the Special Orthogonal Group. Experimental results demonstrate that Fréchet basis provides better semantic factorization and robustness compared to the previous methods. Moreover, we suggest the basis refinement scheme for the previous methods. The quantitative experiments show that the refined basis achieves better semantic factorization while constrained …
[ MH1-2-3-4 ]
The domain generalization (DG) setup considers the problem where models are trained on data sampled from multiple domains and evaluated on test domains unseen during training. In this paper, we formulate DG as a sample selection problem where each domain is sampled from a common underlying population through non-random sampling probabilities that correlate with both the features and the outcome. Under this setting, the fundamental iid assumption of the empirical risk minimization (ERM) is violated, so it often performs worse on test domains whose non-random sampling probabilities differ from the domains in the training dataset. We propose a Selection-Guided DG (SGDG) framework to learn the selection probability of each domain and the joint distribution of the outcome and domain selection variables. The proposed SGDG is domain generalizable as it intends to minimize the risk under the population distribution. We theoretically proved that, under certain regular conditions, SGDG can achieve smaller risk than ERM. Furthermore, we present a class of parametric SGDG (HeckmanDG) estimators applicable to continuous, binary, and multinomial outcomes. We also demonstrated its efficacy empirically through simulations and experiments on a set of benchmark datasets comparing with other well-known DG methods.
[ MH1-2-3-4 ]
Perceiving the world compositionally in terms of space and time is essential to understanding object dynamics and solving downstream tasks. Object-centric learning using generative models has improved in its ability to learn distinct representations of individual objects and predict their interactions, and how to utilize the learned representations to solve untrained, downstream tasks is a focal question. However, as models struggle to predict object interactions and track the objects accurately, especially for unseen configurations, using object-centric representations in downstream tasks is still a challenge. This paper proposes STEDIE, a new model that disentangles object representations, based on interactions, into interaction-relevant relational features and interaction-irrelevant global features without supervision. Empirical evaluation shows that the proposed model factorizes global features, unaffected by interactions from relational features that are necessary to predict outcome of interactions. We also show that STEDIE achieves better performance in planning tasks and understanding causal relationships. In both tasks, our model not only achieves better performance in terms of reconstruction ability but also utilizes the disentangled representations to solve the tasks in a structured manner.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Despite their widespread success in various domains, Transformer networks have yet to perform well across datasets in the domain of 3D atomistic graphs such as molecules even when 3D-related inductive biases like translational invariance and rotational equivariance are considered. In this paper, we demonstrate that Transformers can generalize well to 3D atomistic graphs and present Equiformer, a graph neural network leveraging the strength of Transformer architectures and incorporating SE(3)/E(3)-equivariant features based on irreducible representations (irreps). First, we propose a simple and effective architecture by only replacing original operations in Transformers with their equivariant counterparts and including tensor products. Using equivariant operations enables encoding equivariant information in channels of irreps features without complicating graph structures. With minimal modifications to Transformers, this architecture has already achieved strong empirical results. Second, we propose a novel attention mechanism called equivariant graph attention, which improves upon typical attention in Transformers through replacing dot product attention with multi-layer perceptron attention and including non-linear message passing. With these two innovations, Equiformer achieves competitive results to previous models on QM9, MD17 and OC20 datasets.
[ MH1-2-3-4 ]
Weather and climate simulations produce petabytes of high-resolution data that are later analyzed by researchers in order to understand climate change or severe weather. We propose a new method of compressing this multidimensional weather and climate data: a coordinate-based neural network is trained to overfit the data, and the resulting parameters are taken as a compact representation of the original grid-based data. While compression ratios range from 300x to more than 3,000x, our method outperforms the state-of-the-art compressor SZ3 in terms of weighted RMSE, MAE. It can faithfully preserve important large scale atmosphere structures and does not introduce significant artifacts.When using the resulting neural network as a 790x compressed dataloader to train the WeatherBench forecasting model, its RMSE increases by less than 2%. The three orders of magnitude compression democratizes access to high-resolution climate data and enables numerous new research directions.
[ MH1-2-3-4 ]
Antibody design is valuable for therapeutic usage and biological research. Existing deep-learning-based methods encounter several key issues: 1) incomplete context for Complementarity-Determining Regions (CDRs) generation; 2) incapability of capturing the entire 3D geometry of the input structure; 3) inefficient prediction of the CDR sequences in an autoregressive manner. In this paper, we propose Multi-channel Equivariant Attention Network (MEAN) to co-design 1D sequences and 3D structures of CDRs. To be specific, MEAN formulates antibody design as a conditional graph translation problem by importing extra components including the target antigen and the light chain of the antibody. Then, MEAN resorts to E(3)-equivariant message passing along with a proposed attention mechanism to better capture the geometrical correlation between different components. Finally, it outputs both the 1D sequences and 3D structure via a multi-round progressive full-shot scheme, which enjoys more efficiency and precision against previous autoregressive approaches. Our method significantly surpasses state-of-the-art models in sequence and structure modeling, antigen-binding CDR design, and binding affinity optimization. Specifically, the relative improvement to baselines is about 23\% in antigen-binding CDR design and 34\% for affinity optimization.
[ MH1-2-3-4 ]
Dynamical systems are found in innumerable forms across the physical and biological sciences, yet all these systems fall naturally into equivalence classes: conservative or dissipative, stable or unstable, compressible or incompressible. Predicting these classes from data remains an essential open challenge in computational physics on which existing time-series classification methods struggle. Here, we propose, phase2vec, an embedding method that learns high-quality, physically-meaningful representations of low-dimensional dynamical systems without supervision. Our embeddings are produced by a convolutional backbone that extracts geometric features from flow data and minimizes a physically-informed vector field reconstruction loss. The trained architecture can not only predict the equations of unseen data, but also produces embeddings that encode meaningful physical properties of input data (e.g. stability of fixed points, conservation of energy, and the incompressibility of flows) more faithfully than standard blackbox classifiers and state-of-the-art time series classification techniques. We additionally apply our embeddings to the analysis of meteorological data, showing we can detect climatically meaningful features. Collectively, our results demonstrate the viability of embedding approaches for the discovery of dynamical features in physical systems.
[ MH1-2-3-4 ]
Proteins are macromolecules that perform essential functions in all living organisms. Designing novel proteins with specific structures and desired functions has been a long-standing challenge in the field of bioengineering. Existing approaches generate both protein sequence and structure using either autoregressive models or diffusion models, both of which suffer from high inference costs. In this paper, we propose a new approach capable of protein sequence and structure co-design, which iteratively translates both protein sequence and structure into the desired state from random initialization, based on context features given a priori. Our model consists of a trigonometry-aware encoder that reasons geometrical constraints and interactions from context features, and a roto-translation equivariant decoder that translates protein sequence and structure interdependently. Notably, all protein amino acids are updated in one shot in each translation step, which significantly accelerates the inference process. Experimental results across multiple tasks show that our model outperforms previous state-of-the-art baselines by a large margin, and is able to design proteins of high fidelity as regards both sequence and structure, with running time orders of magnitude less than sampling-based methods.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Point cloud data is ubiquitous in scientific fields. Recently, geometric deep learning (GDL) has been widely applied to solve prediction tasks with such data. However, GDL models are often complicated and hardly interpretable, which poses concerns to scientists who are to deploy these models in scientific analysis and experiments. This work proposes a general mechanism, learnable randomness injection (LRI), which allows building inherently interpretable models based on general GDL backbones. LRI-induced models, once trained, can detect the points in the point cloud data that carry information indicative of the prediction label. We also propose four datasets from real scientific applications that cover the domains of high-energy physics and biochemistry to evaluate the LRI mechanism. Compared with previous post-hoc interpretation methods, the points detected by LRI align much better and stabler with the ground-truth patterns that have actual scientific meanings. LRI is grounded by the information bottleneck principle, and thus LRI-induced models are also more robust to distribution shifts between training and test scenarios. Our code and datasets are available at https://github.com/Graph-COM/LRI.
[ MH1-2-3-4 ]

Cutting planes (cuts) are important for solving mixed-integer linear programs (MILPs), which formulate a wide range of important real-world applications. Cut selection---which aims to select a proper subset of the candidate cuts to improve the efficiency of solving MILPs---heavily depends on (P1) which cuts should be preferred, and (P2) how many cuts should be selected. Although many modern MILP solvers tackle (P1)-(P2) by manually designed heuristics, machine learning offers a promising approach to learn more effective heuristics from MILPs collected from specific applications. However, many existing learning-based methods focus on learning which cuts should be preferred, neglecting the importance of learning the number of cuts that should be selected. Moreover, we observe from extensive empirical results that (P3) what order of selected cuts should be preferred has a significant impact on the efficiency of solving MILPs as well. To address this challenge, we propose a novel hierarchical sequence model (HEM) to learn cut selection policies via reinforcement learning. Specifically, HEM consists of a two-level model: (1) a higher-level model to learn the number of cuts that should be selected, (2) and a lower-level model---that formulates the cut selection task as a sequence to sequence learning problem---to learn policies selecting an …
[ MH1-2-3-4 ]
Kohn-Sham Density Functional Theory (KS-DFT) has been traditionally solved by the Self-Consistent Field (SCF) method. Behind the SCF loop is the physics intuition of solving a system of non-interactive single-electron wave functions under an effective potential. In this work, we propose a deep learning approach to KS-DFT. First, in contrast to the conventional SCF loop, we propose to directly minimize the total energy by reparameterizing the orthogonal constraint as a feed-forward computation. We prove that such an approach has the same expressivity as the SCF method, yet reduces the computational complexity from O(N^4) to O(N^3). Second, the numerical integration which involves a summation over the quadrature grids can be amortized to the optimization steps. At each step, stochastic gradient descent (SGD) is performed with a sampled minibatch of the grids. Extensive experiments are carried out to demonstrate the advantage of our approach in terms of efficiency and stability. In addition, we show that our approach enables us to explore more complex neural-based wave functions.
[ MH1-2-3-4 ]
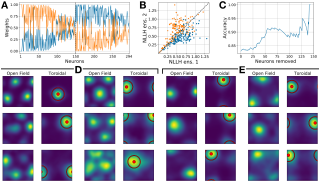
[ MH1-2-3-4 ]
Latent manifolds provide a compact characterization of neural population activity and of shared co-variability across brain areas. Nonetheless, existing statistical tools for extracting neural manifolds face limitations in terms of interpretability of latents with respect to task variables, and can be hard to apply to datasets with no trial repeats. Here we propose a novel probabilistic framework that allows for interpretable partitioning of population variability within and across areas in the context of naturalistic behavior. Our approach for task aligned manifold estimation (TAME-GP) explicitly partitions variability into private and shared sources which can themselves be subdivided in task-relevant and task irrelevant components, uses a realistic Poisson noise model, and introduces temporal smoothing of latent trajectories in the form of a Gaussian Process prior. This TAME-GP graphical model allows for robust estimation of task-relevant variability in local population responses, and of shared co-variability between brain areas. We demonstrate the efficiency of our estimator on within model and biologically motivated simulated data. We also apply it to several datasets of neural population recordings during behavior. Overall, our results demonstrate the capacity of TAME-GP to capture meaningful intra- and inter-area neural variability with single trial resolution.
[ MH1-2-3-4 ]

There is growing interest in understanding how real brains may approximate gradients and how gradients can be used to train neuromorphic chips. However, neither real brains nor neuromorphic chips can perfectly follow the loss gradient, so parameter updates would necessarily use gradient estimators that have some variance and/or bias. Therefore, there is a need to understand better how variance and bias in gradient estimators impact learning dependent on network and task properties. Here, we show that variance and bias can impair learning on the training data, but some degree of variance and bias in a gradient estimator can be beneficial for generalization. We find that the ideal amount of variance and bias in a gradient estimator are dependent on several properties of the network and task: the size and activity sparsity of the network, the norm of the gradient, and the curvature of the loss landscape. As such, whether considering biologically-plausible learning algorithms or algorithms for training neuromorphic chips, researchers can analyze these properties to determine whether their approximation to gradient descent will be effective for learning given their network and task properties.
[ MH1-2-3-4 ]
Recent approximations to backpropagation (BP) have mitigated many of BP's computational inefficiencies and incompatibilities with biology, but important limitations still remain. Moreover, the approximations significantly decrease accuracy in benchmarks, suggesting that an entirely different approach may be more fruitful. Here, grounded on recent theory for Hebbian learning in soft winner-take-all networks, we present multilayer SoftHebb, i.e. an algorithm that trains deep neural networks, without any feedback, target, or error signals. As a result, it achieves efficiency by avoiding weight transport, non-local plasticity, time-locking of layer updates, iterative equilibria, and (self-) supervisory or other feedback signals – which were necessary in other approaches. Its increased efficiency and biological compatibility do not trade off accuracy compared to state-of-the-art bio-plausible learning, but rather improve it. With up to five hidden layers and an added linear classifier, accuracies on MNIST, CIFAR-10, STL-10, and ImageNet, respectively reach 99.4%, 80.3%, 76.2%, and 27.3%. In conclusion, SoftHebb shows with a radically different approach from BP that Deep Learning over few layers may be plausible in the brain and increases the accuracy of bio-plausible machine learning. Code is available at https://github.com/NeuromorphicComputing/SoftHebb.
[ MH1-2-3-4 ]
Neurons in the brain are often finely tuned for specific task variables. Moreover, such disentangled representations are highly sought after in machine learning. Here we mathematically prove that simple biological constraints on neurons, namely nonnegativity and energy efficiency in both activity and weights, promote such sought after disentangled representations by enforcing neurons to become selective for single factors of task variation. We demonstrate these constraints lead to disentanglement in a variety of tasks and architectures, including variational autoencoders. We also use this theory to explain why the brain partitions its cells into distinct cell types such as grid and object-vector cells, and also explain when the brain instead entangles representations in response to entangled task factors. Overall, this work provides a mathematical understanding of why single neurons in the brain often represent single human-interpretable factors, and steps towards an understanding task structure shapes the structure of brain representation.
[ MH1-2-3-4 ]
Optimizing multiple competing objectives is a common problem across science and industry. The inherent inextricable trade-off between those objectives leads one to the task of exploring their Pareto front. A meaningful quantity for the purpose of the latter is the hypervolume indicator, which is used in Bayesian Optimization (BO) and Evolutionary Algorithms (EAs). However, the computational complexity for the calculation of the hypervolume scales unfavorably with increasing number of objectives and data points, which restricts its use in those common multi-objective optimization frameworks. To overcome these restrictions, previous work has focused on approximating the hypervolume using deep learning. In this work, we propose a novel deep learning architecture to approximate the hypervolume function, which we call DeepHV. For better sample efficiency and generalization, we exploit the fact that the hypervolume is scale equivariant in each of the objectives as well as permutation invariant w.r.t. both the objectives and the samples, by using a deep neural network that is equivariant w.r.t. the combined group of scalings and permutations. We show through an ablation study that including these symmetries leads to significantly improved model accuracy. We evaluate our method against exact, and approximate hypervolume methods in terms of accuracy, computation time, and …
[ MH1-2-3-4 ]
The problem of optimization on Stiefel manifold, i.e., minimizing functions of (not necessarily square) matrices that satisfy orthogonality constraints, has been extensively studied. Yet, a new approach is proposed based on, for the first time, an interplay between thoughtfully designed continuous and discrete dynamics. It leads to a gradient-based optimizer with intrinsically added momentum. This method exactly preserves the manifold structure but does not require additional operation to keep momentum in the changing (co)tangent space, and thus has low computational cost and pleasant accuracy. Its generalization to adaptive learning rates is also demonstrated. Notable performances are observed in practical tasks. For instance, we found that placing orthogonal constraints on attention heads of trained-from-scratch Vision Transformer (Dosovitskiy et al., 2020) could markedly improve its performance, when our optimizer is used, and it is better that each head is made orthogonal within itself but not necessarily to other heads. This optimizer also makes the useful notion of Projection Robust Wasserstein Distance (Paty and Cuturi, 2019; Lin et al., 2020) for high-dim. optimal transport even more effective.
[ MH1-2-3-4 ]
Local SGD is a communication-efficient variant of SGD for large-scale training, where multiple GPUs perform SGD independently and average the model parameters periodically. It has been recently observed that Local SGD can not only achieve the design goal of reducing the communication overhead but also lead to higher test accuracy than the corresponding SGD baseline (Lin et al., 2020b), though the training regimes for this to happen are still in debate (Ortiz et al., 2021). This paper aims to understand why (and when) Local SGD generalizes better based on Stochastic Differential Equation (SDE) approximation. The main contributions of this paper include (i) the derivation of an SDE that captures the long-term behavior of Local SGD in the small learning rate regime, showing how noise drives the iterate to drift and diffuse after it has reached close to the manifold of local minima, (ii) a comparison between the SDEs of Local SGD and SGD, showing that Local SGD induces a stronger drift term that can result in a stronger effect of regularization, e.g., a faster reduction of sharpness, and (iii) empirical evidence validating that having a small learning rate and long enough training time enables the generalization improvement over SGD but …
[ MH1-2-3-4 ]
Gradient clipping is an important technique for deep neural networks with exploding gradients, such as recurrent neural networks. Recent studies have shown that the loss functions of these networks do not satisfy the conventional smoothness condition, but instead satisfy a relaxed smoothness condition, i.e., the Lipschitz constant of the gradient scales linearly in terms of the gradient norm. Due to this observation, several gradient clipping algorithms have been developed for nonconvex and relaxed-smooth functions. However, the existing algorithms only apply to the single-machine or multiple-machine setting with homogeneous data across machines. It remains unclear how to design provably efficient gradient clipping algorithms in the general Federated Learning (FL) setting with heterogeneous data and limited communication rounds. In this paper, we design EPISODE, the very first algorithm to solve FL problems with heterogeneous data in the nonconvex and relaxed smoothness setting. The key ingredients of the algorithm are two new techniques called \textit{episodic gradient clipping} and \textit{periodic resampled corrections}. At the beginning of each round, EPISODE resamples stochastic gradients from each client and obtains the global averaged gradient, which is used to (1) determine whether to apply gradient clipping for the entire round and (2) construct local gradient corrections for each …
[ MH1-2-3-4 ]
Denoising diffusion models are a popular class of generative models providing state-of-the-art results in many domains. One adds gradually noise to data using a diffusion to transform the data distribution into a Gaussian distribution. Samples from the generative model are then obtained by simulating an approximation of the time-reversal of this diffusion initialized by Gaussian samples. Practically, the intractable score terms appearing in the time-reversed process are approximated using score matching techniques. We explore here a similar idea to sample approximately from unnormalized probability density functions and estimate their normalizing constants. We consider a process where the target density diffuses towards a Gaussian. Denoising Diffusion Samplers (DDS) are obtained by approximating the corresponding time-reversal. While score matching is not applicable in this context, we can leverage many of the ideas introduced in generative modeling for Monte Carlo sampling. Existing theoretical results from denoising diffusion models also provide theoretical guarantees for DDS. We discuss the connections between DDS, optimal control and Schr\"odinger bridges and finally demonstrate DDS experimentally on a variety of challenging sampling tasks.
[ MH1-2-3-4 ]

Datasets involving multivariate event streams are prevalent in numerous applications. We present a novel framework for modeling temporal point processes called clock logic neural networks (CLNN) which learn weighted clock logic (wCL) formulas as interpretable temporal rules by which some events promote or inhibit other events. Specifically, CLNN models temporal relations between events using conditional intensity rates informed by a set of wCL formulas, which are more expressive than related prior work. Unlike conventional approaches of searching for generative rules through expensive combinatorial optimization, we design smooth activation functions for components of wCL formulas that enable a continuous relaxation of the discrete search space and efficient learning of wCL formulas using gradient-based methods. Experiments on synthetic datasets manifest our model's ability to recover the ground-truth rules and improve computational efficiency. In addition, experiments on real-world datasets show that our models perform competitively when compared with state-of-the-art models.
[ MH1-2-3-4 ]
While machine learning models rapidly advance the state-of-the-art on various real-world tasks, out-of-domain (OOD) generalization remains a challenging problem given the vulnerability of these models to spurious correlations. We propose a balanced mini-batch sampling strategy to transform a biased data distribution into a spurious-free balanced distribution, based on the invariance of the underlying causal mechanisms for the data generation process. We argue that the Bayes optimal classifiers trained on such balanced distribution are minimax optimal across a diverse enough environment space. We also provide an identifiability guarantee of the latent variable model of the proposed data generation process, when utilizing enough train environments. Experiments are conducted on DomainBed, demonstrating empirically that our method obtains the best performance across 20 baselines reported on the benchmark.
[ MH1-2-3-4 ]
Early stopping based on the validation set performance is a popular approach to find the right balance between under- and overfitting in the context of supervised learning. However, in reinforcement learning, even for supervised sub-problems such as world model learning, early stopping is not applicable as the dataset is continually evolving. As a solution, we propose a new general method that dynamically adjusts the update to data (UTD) ratio during training based on under- and overfitting detection on a small subset of the continuously collected experience not used for training. We apply our method to DreamerV2, a state-of-the-art model-based reinforcement learning algorithm, and evaluate it on the DeepMind Control Suite and the Atari 100k benchmark. The results demonstrate that one can better balance under- and overestimation by adjusting the UTD ratio with our approach compared to the default setting in DreamerV2 and that it is competitive with an extensive hyperparameter search which is not feasible for many applications. Our method eliminates the need to set the UTD hyperparameter by hand and even leads to a higher robustness with regard to other learning-related hyperparameters further reducing the amount of necessary tuning.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Preference-based reinforcement learning (RL) provides a framework to train agents using human preferences between two behaviors. However, preference-based RL has been challenging to scale since it requires a large amount of human feedback to learn a reward function aligned with human intent. In this paper, we present Preference Transformer, a neural architecture that models human preferences using transformers. Unlike prior approaches assuming human judgment is based on the Markovian rewards which contribute to the decision equally, we introduce a new preference model based on the weighted sum of non-Markovian rewards. We then design the proposed preference model using a transformer architecture that stacks causal and bidirectional self-attention layers. We demonstrate that Preference Transformer can solve a variety of control tasks using real human preferences, while prior approaches fail to work. We also show that Preference Transformer can induce a well-specified reward and attend to critical events in the trajectory by automatically capturing the temporal dependencies in human decision-making. Code is available on the project website: https://sites.google.com/view/preference-transformer.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
There is a recent trend of applying multi-agent reinforcement learning (MARL) to train an agent that can cooperate with humans in a zero-shot fashion without using any human data. The typical workflow is to first repeatedly run self-play (SP) to build a policy pool and then train the final adaptive policy against this pool. A crucial limitation of this framework is that every policy in the pool is optimized w.r.t. the environment reward function, which implicitly assumes that the testing partners of the adaptive policy will be precisely optimizing the same reward function as well. However, human objectives are often substantially biased according to their own preferences, which can differ greatly from the environment reward. We propose a more general framework, Hidden-Utility Self-Play (HSP), which explicitly models human biases as hidden reward functions in the self-play objective. By approximating the reward space as linear functions, HSP adopts an effective technique to generate an augmented policy pool with biased policies. We evaluate HSP on the Overcooked benchmark. Empirical results show that our HSP method produces higher rewards than baselines when cooperating with learned human models, manually scripted policies, and real humans. The HSP policy is also rated as the most assistive …
[ MH1-2-3-4 ]
The potential of offline reinforcement learning (RL) is that high-capacity models trained on large, heterogeneous datasets can lead to agents that generalize broadly, analogously to similar advances in vision and NLP. However, recent works argue that offline RL methods encounter unique challenges to scaling up model capacity. Drawing on the learnings from these works, we re-examine previous design choices and find that with appropriate choices: ResNets, cross-entropy based distributional backups, and feature normalization, offline Q-learning algorithms exhibit strong performance that scales with model capacity. Using multi-task Atari as a testbed for scaling and generalization, we train a single policy on 40 games with near-human performance using up-to 80 million parameter networks, finding that model performance scales favorably with capacity. In contrast to prior work, we extrapolate beyond dataset performance even when trained entirely on a large (400M transitions) but highly suboptimal dataset (51% human-level performance). Compared to return-conditioned supervised approaches, offline Q-learning scales similarly with model capacity and has better performance, especially when the dataset is suboptimal. Finally, we show that offline Q-learning with a diverse dataset is sufficient to learn powerful representations that facilitate rapid transfer to novel games and fast online learning on new variations of a training …
[ MH1-2-3-4 ]
We propose Structured Exploration with Achievements (SEA), a multi-stage reinforcement learning algorithm designed for achievement-based environments, a particular type of environment with an internal achievement set. SEA first uses offline data to learn a representation of the known achievements with a determinant loss function, then recovers the dependency graph of the learned achievements with a heuristic algorithm, and finally interacts with the environment online to learn policies that master known achievements and explore new ones with a controller built with the recovered dependency graph. We empirically demonstrate that SEA can recover the achievement structure accurately and improve exploration in hard domains such as Crafter that are procedurally generated with high-dimensional observations like images.
[ MH1-2-3-4 ]
Inverse reinforcement learning (IRL) methods assume that the expert data is generated by an agent optimizing some reward function. However, in many settings, the agent may optimize a reward function subject to some constraints, where the constraints induce behaviors that may be otherwise difficult to express with just a reward function. We consider the setting where the reward function is given, and the constraints are unknown, and propose a method that is able to recover these constraints satisfactorily from the expert data. While previous work has focused on recovering hard constraints, our method can recover cumulative soft constraints that the agent satisfies on average per episode. In IRL fashion, our method solves this problem by adjusting the constraint function iteratively through a constrained optimization procedure, until the agent behavior matches the expert behavior. We demonstrate our approach on synthetic environments, robotics environments and real world highway driving scenarios.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]

Poor sample efficiency continues to be the primary challenge for deployment of deep Reinforcement Learning (RL) algorithms for real-world applications, and in particular for visuo-motor control. Model-based RL has the potential to be highly sample efficient by concurrently learning a world model and using synthetic rollouts for planning and policy improvement. However, in practice, sample-efficient learning with model-based RL is bottlenecked by the exploration challenge. In this work, we find that leveraging just a handful of demonstrations can dramatically improve the sample-efficiency of model-based RL. Simply appending demonstrations to the interaction dataset, however, does not suffice. We identify key ingredients for leveraging demonstrations in model learning -- policy pretraining, targeted exploration, and oversampling of demonstration data -- which forms the three phases of our model-based RL framework. We empirically study three complex visuo-motor control domains and find that our method is 160%-250% more successful in completing sparse reward tasks compared to prior approaches in the low data regime (100k interaction steps, 5 demonstrations). Code and videos are available at https://nicklashansen.github.io/modemrl.
[ MH1-2-3-4 ]

Despite the recent advancement in multi-agent reinforcement learning (MARL), the MARL agents easily overfit the training environment and perform poorly in evaluation scenarios where other agents behave differently. Obtaining generalizable policies for MARL agents is thus necessary but challenging mainly due to complex multi-agent interactions. In this work, we model the MARL problem with Markov Games and propose a simple yet effective method, called ranked policy memory (RPM), i.e., to maintain a look-up memory of policies to achieve good generalizability. The main idea of RPM is to train MARL policies via gathering massive multi-agent interaction data. In particular, we first rank each agent’s policies by its training episode return, i.e., the episode return of each agent in the training environment; we then save the ranked policies in the memory; when an episode starts, each agent can randomly select a policy from the RPM as the behavior policy. Each agent uses the behavior policy to gather multi-agent interaction data for MARL training. This innovative self-play framework guarantees the diversity of multi-agent interaction in the training data. Experimental results on Melting Pot demonstrate that RPM enables MARL agents to interact with unseen agents in multi-agent generalization evaluation scenarios and complete given tasks. …
[ MH1-2-3-4 ]
Reinforcement learning (RL) agents can leverage batches of previously collected data to extract a reasonable control policy. An emerging issue in this offline RL setting, however, is that the bootstrapping update underlying many of our methods suffers from insufficient action-coverage: standard max operator may select a maximal action that has not been seen in the dataset. Bootstrapping from these inaccurate values can lead to overestimation and even divergence. There are a growing number of methods that attempt to approximate an in-sample max, that only uses actions well-covered by the dataset. We highlight a simple fact: it is more straightforward to approximate an in-sample softmax using only actions in the dataset. We show that policy iteration based on the in-sample softmax converges, and that for decreasing temperatures it approaches the in-sample max. We derive an In-Sample Actor-Critic (AC), using this in-sample softmax, and show that it is consistently better or comparable to existing offline RL methods, and is also well-suited to fine-tuning. We release the code at github.com/hwang-ua/inac_pytorch.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]

The goal of multi-objective reinforcement learning (MORL) is to learn policies that simultaneously optimize multiple competing objectives. In practice, an agent's preferences over the objectives may not be known apriori, and hence, we require policies that can generalize to arbitrary preferences at test time. In this work, we propose a new data-driven setup for offline MORL, where we wish to learn a preference-agnostic policy agent using only a finite dataset of offline demonstrations of other agents and their preferences. The key contributions of this work are two-fold. First, we introduce D4MORL, (D)atasets for MORL that are specifically designed for offline settings. It contains 1.8 million annotated demonstrations obtained by rolling out reference policies that optimize for randomly sampled preferences on 6 MuJoCo environments with 2-3 objectives each. Second, we propose Pareto-Efficient Decision Agents (PEDA), a family of offline MORL algorithms that builds and extends Decision Transformers via a novel preference-and-return-conditioned policy. Empirically, we show that PEDA closely approximates the behavioral policy on the D4MORL benchmark and provides an excellent approximation of the Pareto-front with appropriate conditioning, as measured by the hypervolume and sparsity metrics.
[ MH1-2-3-4 ]
Muscle-actuated organisms are capable of learning an unparalleled diversity of dexterous movements despite their vast amount of muscles. Reinforcement learning (RL) on large musculoskeletal models, however, has not been able to show similar performance. We conjecture that ineffective exploration in large overactuated action spaces is a key problem.This is supported by the finding that common exploration noise strategies are inadequate in synthetic examples of overactuated systems. We identify differential extrinsic plasticity (DEP), a method from the domain of self-organization, as being able to induce state-space covering exploration within seconds of interaction. By integrating DEP into RL, we achieve fast learning of reaching and locomotion in musculoskeletal systems, outperforming current approaches in all considered tasks in sample efficiency and robustness.
[ MH1-2-3-4 ]
We address the problem of safe reinforcement learning from pixel observations. Inherent challenges in such settings are (1) a trade-off between reward optimization and adhering to safety constraints, (2) partial observability, and (3) high-dimensional observations. We formalize the problem in a constrained, partially observable Markov decision process framework, where an agent obtains distinct reward and safety signals. To address the curse of dimensionality, we employ a novel safety critic using the stochastic latent actor-critic (SLAC) approach. The latent variable model predicts rewards and safety violations, and we use the safety critic to train safe policies. Using well-known benchmark environments, we demonstrate competitive performance over existing approaches regarding computational requirements, final reward return, and satisfying the safety constraints.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Deep Reinforcement Learning (RL) has emerged as a powerful paradigm for training neural policies to solve complex control tasks. However, these policies tend to be overfit to the exact specifications of the task and environment they were trained on, and thus do not perform well when conditions deviate slightly or when composed hierarchically to solve even more complex tasks. Recent work has shown that training a mixture of policies, as opposed to a single one, that are driven to explore different regions of the state-action space can address this shortcoming by generating a diverse set of behaviors, referred to as skills, that can be collectively used to great effect in adaptation tasks or for hierarchical planning. This is typically realized by including a diversity term - often derived from information theory - in the objective function optimized by RL. However these approaches often require careful hyperparameter tuning to be effective. In this work, we demonstrate that less widely-used neuroevolution methods, specifically Quality Diversity (QD), are a competitive alternative to information-theory-augmented RL for skill discovery. Through an extensive empirical evaluation comparing eight state-of-the-art algorithms (four flagship algorithms from each line of work) on the basis of (i) metrics directly evaluating the …
[ MH1-2-3-4 ]
Although deep reinforcement learning (DRL) has many success stories, the large-scale deployment of policies learned through these advanced techniques in safety-critical scenarios is hindered by their lack of formal guarantees. Variational Markov Decision Processes (VAE-MDPs) are discrete latent space models that provide a reliable framework for distilling formally verifiable controllers from any RL policy. While the related guarantees address relevant practical aspects such as the satisfaction of performance and safety properties, the VAE approach suffers from several learning flaws (posterior collapse, slow learning speed, poor dynamics estimates), primarily due to the absence of abstraction and representation guarantees to support latent optimization. We introduce the Wasserstein auto-encoded MDP (WAE-MDP), a latent space model that fixes those issues by minimizing a penalized form of the optimal transport between the behaviors of the agent executing the original policy and the distilled policy, for which the formal guarantees apply. Our approach yields bisimulation guarantees while learning the distilled policy, allowing concrete optimization of the abstraction and representation model quality. Our experiments show that, besides distilling policies up to 10 times faster, the latent model quality is indeed better in general. Moreover, we present experiments from a simple time-to-failure verification algorithm on the latent space. …
[ MH1-2-3-4 ]
Large language models (LMs) have been shown to memorize parts of their training data, and when prompted appropriately, they will emit the memorized training data verbatim. This is undesirable because memorization violates privacy (exposing user data), degrades utility (repeated easy-to-memorize text is often low quality), and hurts fairness (some texts are memorized over others).We describe three log-linear relationships that quantify the degree to which LMs emit memorized training data. Memorization significantly grows as we increase (1) the capacity of a model, (2) the number of times an example has been duplicated, and (3) the number of tokens of context used to prompt the model. Surprisingly, we find the situation becomes complicated when generalizing these results across model families. On the whole, we find that memorization in LMs is more prevalent than previously believed and will likely get worse as models continues to scale, at least without active mitigations.
[ MH1-2-3-4 ]
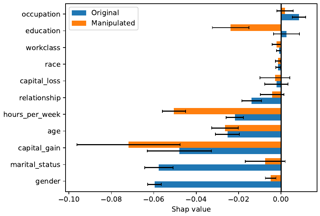
SHAP explanations aim at identifying which features contribute the most to the difference in model prediction at a specific input versus a background distribution. Recent studies have shown that they can be manipulated by malicious adversaries to produce arbitrary desired explanations. However, existing attacks focus solely on altering the black-box model itself. In this paper, we propose a complementary family of attacks that leave the model intact and manipulate SHAP explanations using stealthily biased sampling of the data points used to approximate expectations w.r.t the background distribution. In the context of fairness audit, we show that our attack can reduce the importance of a sensitive feature when explaining the difference in outcomes between groups while remaining undetected. More precisely, experiments performed on real-world datasets showed that our attack could yield up to a 90\% relative decrease in amplitude of the sensitive feature attribution. These results highlight the manipulability of SHAP explanations and encourage auditors to treat them with skepticism.
[ MH1-2-3-4 ]

Various saliency map methods have been proposed to interpret and explain predictions of deep learning models. Saliency maps allow us to interpret which parts of the input signals have a strong influence on the prediction results. However, since a saliency map is obtained by complex computations in deep learning models, it is often difficult to know how reliable the saliency map itself is. In this study, we propose a method to quantify the reliability of a saliency region in the form of p-values. Our idea is to consider a saliency map as a selected hypothesis by the trained deep learning model and employ the selective inference framework. The proposed method provably provides a valid p-value for the detected salient region, i.e., we can provably control the false positive rate of the detected salient region. We demonstrate the validity of the proposed method through numerical examples in synthetic and real datasets. Furthermore, we develop a Keras-based framework for conducting the proposed selective inference for a wide class of CNNs without additional implementation cost.
[ MH1-2-3-4 ]
The backdoor attack, where the adversary uses inputs stamped with triggers (e.g., a patch) to activate pre-planted malicious behaviors, is a severe threat to Deep Neural Network (DNN) models. Trigger inversion is an effective way of identifying backdoor models and understanding embedded adversarial behaviors. A challenge of trigger inversion is that there are many ways of constructing the trigger. Existing methods cannot generalize to various types of triggers by making certain assumptions or attack-specific constraints. The fundamental reason is that existing work does not formally define the trigger and the inversion problem. This work formally defines and analyzes the trigger and the inversion problem. Then, it proposes a unified framework to invert backdoor triggers based on the formalization of triggers and the identified inner behaviors of backdoor models from our analysis. Our prototype UNICORN is general and effective in inverting backdoor triggers in DNNs. The code can be found at https://github.com/RU-System-Software-and-Security/UNICORN.
[ MH1-2-3-4 ]
Text classifiers have promising applications in high-stake tasks such as resume screening and content moderation. These classifiers must be fair and avoid discriminatory decisions by being invariant to perturbations of sensitive attributes such as gender or ethnicity. However, there is a gap between human intuition about these perturbations and the formal similarity specifications capturing them. While existing research has started to address this gap, current methods are based on hardcoded word replacements, resulting in specifications with limited expressivity or ones that fail to fully align with human intuition (e.g., in cases of asymmetric counterfactuals). This work proposes novel methods for bridging this gap by discovering expressive and intuitive individual fairness specifications. We show how to leverage unsupervised style transfer and GPT-3's zero-shot capabilities to automatically generate expressive candidate pairs of semantically similar sentences that differ along sensitive attributes. We then validate the generated pairs via an extensive crowdsourcing study, which confirms that a lot of these pairs align with human intuition about fairness in the context of toxicity classification. Finally, we show how limited amounts of human feedback can be leveraged to learn a similarity specification that can be used to train downstream fairness-aware models.
[ MH1-2-3-4 ]
As industrial applications are increasingly automated by machine learning models, enforcing personal data ownership and intellectual property rights requires tracing training data back to their rightful owners. Membership inference algorithms approach this problem by using statistical techniques to discern whether a target sample was included in a model's training set. However, existing methods only utilize the unaltered target sample or simple augmentations of the target to compute statistics. Such a sparse sampling of the model's behavior carries little information, leading to poor inference capabilities. In this work, we use adversarial tools to directly optimize for queries that are discriminative and diverse. Our improvements achieve significantly more accurate membership inference than existing methods, especially in offline scenarios and in the low false-positive regime which is critical in legal settings.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
There is a fundamental limitation in the prediction performance that a machine learning model can achieve due to the inevitable uncertainty of the prediction target. In classification problems, this can be characterized by the Bayes error, which is the best achievable error with any classifier. The Bayes error can be used as a criterion to evaluate classifiers with state-of-the-art performance and can be used to detect test set overfitting. We propose a simple and direct Bayes error estimator, where we just take the mean of the labels that show \emph{uncertainty} of the class assignments. Our flexible approach enables us to perform Bayes error estimation even for weakly supervised data. In contrast to others, our method is model-free and even instance-free. Moreover, it has no hyperparameters and gives a more accurate estimate of the Bayes error than several baselines empirically. Experiments using our method suggest that recently proposed deep networks such as the Vision Transformer may have reached, or is about to reach, the Bayes error for benchmark datasets. Finally, we discuss how we can study the inherent difficulty of the acceptance/rejection decision for scientific articles, by estimating the Bayes error of the ICLR papers from 2017 to 2023.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Devising a fair classifier that does not discriminate against different groups is an important problem in machine learning. Although researchers have proposed various ways of defining group fairness, most of them only focused on the immediate fairness, ignoring the long-term impact of a fair classifier under the dynamic scenario where each individual can improve its feature over time. Such dynamic scenarios happen in real world, e.g., college admission and credit loaning, where each rejected sample makes effort to change its features to get accepted afterwards. In this dynamic setting, the long-term fairness should equalize the samples’ feature distribution across different groups after the rejected samples make some effort to improve. In order to promote long-term fairness, we propose a new fairness notion called Equal Improvability (EI), which equalizes the potential acceptance rate of the rejected samples across different groups assuming a bounded level of effort will be spent by each rejected sample. We analyze the properties of EI and its connections with existing fairness notions. To find a classifier that satisfies the EI requirement, we propose and study three different approaches that solve EI regularized optimization problems. Through experiments on both synthetic and real datasets, we demonstrate that the proposed …
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Transformers have become a default architecture in computer vision, but understanding what drives their predictions remains a challenging problem. Current explanation approaches rely on attention values or input gradients, but these provide a limited view of a model’s dependencies. Shapley values offer a theoretically sound alternative, but their computational cost makes them impractical for large, high-dimensional models. In this work, we aim to make Shapley values practical for vision transformers (ViTs). To do so, we first leverage an attention masking approach to evaluate ViTs with partial information, and we then develop a procedure to generate Shapley value explanations via a separate, learned explainer model. Our experiments compare Shapley values to many baseline methods (e.g., attention rollout, GradCAM, LRP), and we find that our approach provides more accurate explanations than existing methods for ViTs.
[ MH1-2-3-4 ]
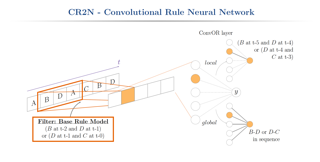
Discovering interpretable patterns for classification of sequential data is of key importance for a variety of fields, ranging from genomics to fraud detection or more generally interpretable decision-making.In this paper, we propose a novel differentiable fully interpretable method to discover both local and global patterns (i.e. catching a relative or absolute temporal dependency) for rule-based binary classification.It consists of a convolutional binary neural network with an interpretable neural filter and a training strategy based on dynamically-enforced sparsity.We demonstrate the validity and usefulness of the approach on synthetic datasets and on an open-source peptides dataset.Key to this end-to-end differentiable method is that the expressive patterns used in the rules are learned alongside the rules themselves.
[ MH1-2-3-4 ]
Federated clustering (FC) is an unsupervised learning problem that arises in a number of practical applications, including personalized recommender and healthcare systems. With the adoption of recent laws ensuring the "right to be forgotten", the problem of machine unlearning for FC methods has become of significant importance. We introduce, for the first time, the problem of machine unlearning for FC, and propose an efficient unlearning mechanism for a customized secure FC framework. Our FC framework utilizes special initialization procedures that we show are well-suited for unlearning. To protect client data privacy, we develop the secure compressed multiset aggregation (SCMA) framework that addresses sparse secure federated learning (FL) problems encountered during clustering as well as more general problems. To simultaneously facilitate low communication complexity and secret sharing protocols, we integrate Reed-Solomon encoding with special evaluation points into our SCMA pipeline, and prove that the client communication cost is logarithmic in the vector dimension. Additionally, to demonstrate the benefits of our unlearning mechanism over complete retraining, we provide a theoretical analysis for the unlearning performance of our approach. Simulation results show that the new FC framework exhibits superior clustering performance compared to previously reported FC baselines when the cluster sizes are highly …
[ MH1-2-3-4 ]
With the increasing amount of multimedia data on modern mobile systems and IoT infrastructures, harnessing these rich multimodal data without breaching user privacy becomes a critical issue. Federated learning (FL) serves as a privacy-conscious alternative to centralized machine learning. However, existing FL methods extended to multimodal data all rely on model aggregation on single modality level, which restrains the server and clients to have identical model architecture for each modality. This limits the global model in terms of both model complexity and data capacity, not to mention task diversity. In this work, we propose \textit{Contrastive Representation Ensemble and Aggregation for Multimodal FL (CreamFL)}, a multimodal federated learning framework that enables training larger server models from clients with heterogeneous model architectures and data modalities, while only communicating knowledge on public dataset. To achieve better multimodal representation fusion, we design a global-local cross-modal ensemble strategy to aggregate client representations. To mitigate local model drift caused by two unprecedented heterogeneous factors stemming from multimodal discrepancy (\textit{modality gap} and \textit{task gap}), we further propose two inter-modal and intra-modal contrasts to regularize local training, which complements information of the absent modality for uni-modal clients and regularizes local clients to head towards global consensus. Thorough evaluations …
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]

We consider Contextual Bandits with Concave Rewards (CBCR), a multi-objective bandit problem where the desired trade-off between the rewards is defined by a known concave objective function, and the reward vector depends on an observed stochastic context. We present the first algorithm with provably vanishing regret for CBCR without restrictions on the policy space, whereas prior works were restricted to finite policy spaces or tabular representations. Our solution is based on a geometric interpretation of CBCR algorithms as optimization algorithms over the convex set of expected rewards spanned by all stochastic policies. Building on Frank-Wolfe analyses in constrained convex optimization, we derive a novel reduction from the CBCR regret to the regret of a \emph{scalar-reward} bandit problem. We illustrate how to apply the reduction off-the-shelf to obtain algorithms for CBCR with both linear and general reward functions, in the case of non-combinatorial actions. Motivated by fairness in recommendation, we describe a special case of CBCR with rankings and fairness-aware objectives, leading to the first algorithm with regret guarantees for contextual combinatorial bandits with fairness of exposure.
[ MH1-2-3-4 ]
Machine learning classifiers with high test accuracy often perform poorly under adversarial attacks. It is commonly believed that adversarial training alleviates this issue. In this paper, we demonstrate that, surprisingly, the opposite can be true for a natural class of perceptible perturbations --- even though adversarial training helps when enough data is available, it may in fact hurt robust generalization in the small sample size regime. We first prove this phenomenon for a high-dimensional linear classification setting with noiseless observations. Using intuitive insights from the proof, we could surprisingly find perturbations on standard image datasets for which this behavior persists. Specifically, it occurs for perceptible attacks that effectively reduce class information such as object occlusions or corruptions.
[ MH1-2-3-4 ]
Self-training (ST), or pseudo-labeling has sparked significant interest in the automatic speech recognition (ASR) community recently because of its success in harnessing unlabeled data. Unlike prior semi-supervised learning approaches that relied on iteratively regenerating pseudo-labels (PLs) from a trained model and using them to train a new model, recent state-of-the-art methods perform `continuous training' where PLs are generated using a very recent version of the model being trained. Nevertheless, these approaches still rely on bootstrapping the ST using an initial supervised learning phase where the model is trained on labeled data alone. We believe this has the potential for over-fitting to the labeled dataset in low resource settings and that ST from the start of training should reduce over-fitting. In this paper we show how we can do this by dynamically controlling the evolution of PLs during the training process in ASR. To the best of our knowledge, this is the first study that shows the feasibility of generating PLs from the very start of the training. We are able to achieve this using two techniques that avoid instabilities which lead to degenerate models that do not generalize. Firstly, we control the evolution of PLs through a curriculum that uses …
[ MH1-2-3-4 ]
We present a method to map 2D image observations of a scene to a persistent 3D scene representation, enabling novel view synthesis and disentangled representation of the movable and immovable components of the scene. Motivated by the bird’s-eye-view (BEV) representation commonly used in vision and robotics, we propose conditional neural groundplans, ground-aligned 2D feature grids, as persistent and memory-efficient scene representations. Our method is trained self-supervised from unlabeled multi-view observations using differentiable rendering, and learns to complete geometry and appearance of occluded regions. In addition, we show that we can leverage multi-view videos at training time to learn to separately reconstruct static and movable components of the scene from a single image at test time. The ability to separately reconstruct movable objects enables a variety of downstream tasks using simple heuristics, such as extraction of object-centric 3D representations, novel view synthesis, instance-level segmentation, 3D bounding box prediction, and scene editing. This highlights the value of neural groundplans as a backbone for efficient 3D scene understanding models.
[ MH1-2-3-4 ]
Deep neural networks based on layer-stacking architectures have historically suffered from poor inherent interpretability. Meanwhile, symbolic probabilistic models function with clear interpretability, but how to combine them with neural networks to enhance their performance remains to be explored. In this paper, we try to marry these two systems for text classification via a structured language model. We propose a Symbolic-Neural model that can learn to explicitly predict class labels of text spans from a constituency tree without requiring any access to span-level gold labels. As the structured language model learns to predict constituency trees in a self-supervised manner, only raw texts and sentence-level labels are required as training data, which makes it essentially a general constituent-level self-interpretable classification model. Our experiments demonstrate that our approach could achieve good prediction accuracy in downstream tasks. Meanwhile, the predicted span labels are consistent with human rationales to a certain degree.
[ MH1-2-3-4 ]
Self-paced learning has been beneficial for tasks where some initial knowledge is available, such as weakly supervised learning and domain adaptation, to select and order the training sample sequence, from easy to complex. However its applicability remains unexplored in unsupervised learning, whereby the knowledge of the task matures during training.We propose a novel HYperbolic Self-Paced model (HYSP) for learning skeletonbased action representations. HYSP adopts self-supervision: it uses data augmentations to generate two views of the same sample, and it learns by matching one (named online) to the other (the target). We propose to use hyperbolic uncertainty to determine the algorithmic learning pace, under the assumption that less uncertain samples should be more strongly driving the training, with a larger weight and pace. Hyperbolic uncertainty is a by-product of the adopted hyperbolic neural networks, it matures during training and it comes with no extra cost, compared to the established Euclidean SSL framework counterparts.When tested on three established skeleton-based action recognition datasets, HYSP outperforms the state-of-the-art on PKU-MMD I, as well as on 2 out of 3 downstream tasks on NTU-60 and NTU-120. Additionally, HYSP only uses positive pairs and bypasses therefore the complex and computationally-demanding mining procedures required for the negatives …
[ MH1-2-3-4 ]

Contrastive learning is a cornerstone underlying recent progress in multi-view and multimodal learning, e.g., in representation learning with image/caption pairs. While its effectiveness is not yet fully understood, a line of recent work reveals that contrastive learning can invert the data generating process and recover ground truth latent factors shared between views. In this work, we present new identifiability results for multimodal contrastive learning, showing that it is possible to recover shared factors in a more general setup than the multi-view setting studied previously. Specifically, we distinguish between the multi-view setting with one generative mechanism (e.g., multiple cameras of the same type) and the multimodal setting that is characterized by distinct mechanisms (e.g., cameras and microphones). Our work generalizes previous identifiability results by redefining the generative process in terms of distinct mechanisms with modality-specific latent variables. We prove that contrastive learning can block-identify latent factors shared between modalities, even when there are nontrivial dependencies between factors. We empirically verify our identifiability results with numerical simulations and corroborate our findings on a complex multimodal dataset of image/text pairs. Zooming out, our work provides a theoretical basis for multimodal representation learning and explains in which settings multimodal contrastive learning can be effective …
[ MH1-2-3-4 ]
Vessel segmentation in medical images is one of the important tasks in the diagnosis of vascular diseases and therapy planning. Although learning-based segmentation approaches have been extensively studied, a large amount of ground-truth labels are required in supervised methods and confusing background structures make neural networks hard to segment vessels in an unsupervised manner. To address this, here we introduce a novel diffusion adversarial representation learning (DARL) model that leverages a denoising diffusion probabilistic model with adversarial learning, and apply it to vessel segmentation. In particular, for self-supervised vessel segmentation, DARL learns the background signal using a diffusion module, which lets a generation module effectively provide vessel representations. Also, by adversarial learning based on the proposed switchable spatially-adaptive denormalization, our model estimates synthetic fake vessel images as well as vessel segmentation masks, which further makes the model capture vessel-relevant semantic information. Once the proposed model is trained, the model generates segmentation masks in a single step and can be applied to general vascular structure segmentation of coronary angiography and retinal images. Experimental results on various datasets show that our method significantly outperforms existing unsupervised and self-supervised vessel segmentation methods.
[ MH1-2-3-4 ]
In reinforcement learning for safety-critical settings, it is often desirable for the agent to obey safety constraints at all points in time, including during training. We present a novel neurosymbolic approach called SPICE to solve this safe exploration problem. SPICE uses an online shielding layer based on symbolic weakest preconditions to achieve a more precise safety analysis than existing tools without unduly impacting the training process. We evaluate the approach on a suite of continuous control benchmarks and show that it can achieve comparable performance to existing safe learning techniques while incurring fewer safety violations. Additionally, we present theoretical results showing that SPICE converges to the optimal safe policy under reasonable assumptions.
Social: Gerhard Neumann Mon 1 May 12:30 p.m.
I am a full professor at the KIT and heading the chair "Autonomous Learning Robots" since Jan. 2020. Before that, I was group leader at the Bosch Center for AI and industry on campus professor at the University of Tübingen (from March to Dec. 2019) and full professor at the University of Lincoln in the UK (2016-2019). I completed my PhD in 2012 at the TU Graz and was afterwards PostDoc and Assistant Professor at the TU Darmstadt.
My research is therefore focused on the intersection of machine learning, robotics and human-robot interaction. My goal is to create data-efficient machine learning algorithms that that are suitable for complex robot domains. A strong focus of my research is to develop new methods that allow a human non-expert to intuitively teach a robot complex skills as well as to allow a robot to learn how to assist and collaborate with humans in an intelligent way. In my research, I always aim for a strong theoretical basis for my developed algorithms which are derived from first order principles. Yet, I also believe that an exhaustive assessment of the quality of an algorithm in a practical application is of equal importance.
Social: Ari Morcos Mon 1 May 12:30 p.m.
Ari Morcos is a research scientist at Meta AI Research (FAIR Team) in Menlo Park working on understanding the mechanisms underlying neural network computation and function, and using these insights to build machine learning systems more intelligently. Most recently, his work has focused on understanding properties of data and how these properties lead to desirable and useful representations. He has worked on a variety of topics, including self-supervised learning, the lottery ticket hypothesis, the mechanisms underlying common regularizers, and the properties predictive of generalization, as well as methods to compare representations across networks, the role of single units in computation, and on strategies to induce and measure abstraction in neural network representations.
Social: Natalie Schluter Mon 1 May 12:30 p.m.
Natalie Schluter is a Machine Learning Researcher with MLR at Apple. Before coming to Apple, she was Senior Research Scientist at Google Brain and Associate Professor in NLP and Data Science at the IT University (ITU), in Copenhagen, Denmark. At ITU she co-developed and led the first Data Science programme in Denmark, a BSc.
Natalie's primary research interests are in algorithms and experimental methodology for the development of statistical and combinatorial models of natural language understanding and generation. This is especially under computationally ``hard'' and language-inclusive settings.
Natalie holds a PhD in NLP from Dublin City University's School of Computing. She holds a further four degrees: an MSc in Mathematics from Trinity College, Dublin, a BSc in Mathematics and MA in Linguistics from the University of Montreal, and a BA in French and Spanish.
Invited Talk: Girmaw Abebe Tadesse
Understanding Systematic Deviations in Data for Trustworthy AI
With a growing trend of employing machine learning (ML) models to assist decision making, it is vital to inspect both the models and their corresponding data for potential systematic deviations in order to achieve trustworthy ML applications. Such inspected data may be used in training, testing or generated by the models themselves. Understanding of systematic deviations is particularly crucial in resource-limited and/or error-sensitive domains, such as healthcare. In this talk, I reflect on our recent work which has utilized automated identification and characterization of systematic deviations for various tasks in healthcare, including; data quality understanding; temporal drift; heterogeneous intervention effects analysis; and new class detection. Moreover, AI-driven scientific discovery is increasingly being facilitated using generative models. And I will share how our data-centric and multi-level evaluation framework helps to quantify the capabilities of generative models in both domain-agnostic and interpretable ways, using material science as a use case. Beyond the analysis of curated datasets which are often utilized to train ML models, similar data-centric analysis should also be considered on traditional data sources, such as textbooks. To this end I will conclude by presenting a recent collaborative work on automated representation analysis in dermatology academic materials.
Bio :
Oral 2 Track 1: Applications Mon 1 May 03:00 p.m.
[ AD11 ]

We present the Group Propagation Vision Transformer (GPViT): a novel non- hierarchical (i.e. non-pyramidal) transformer model designed for general visual recognition with high-resolution features. High-resolution features (or tokens) are a natural fit for tasks that involve perceiving fine-grained details such as detection and segmentation, but exchanging global information between these features is expensive in memory and computation because of the way self-attention scales. We provide a highly efficient alternative Group Propagation Block (GP Block) to exchange global information. In each GP Block, features are first grouped to- gether by a fixed number of learnable group tokens; we then perform Group Propagation where global information is exchanged between the grouped fea- tures; finally, global information in the updated grouped features is returned back to the image features through a transformer decoder. We evaluate GPViT on a variety of visual recognition tasks including image classification, semantic seg- mentation, object detection, and instance segmentation. Our method achieves significant performance gains over previous works across all tasks, especially on tasks that require high-resolution outputs, for example, our GPViT-L3 out- performs Swin Transformer-B by 2.0 mIoU on ADE20K semantic segmentation with only half as many parameters. Code and pre-trained models are available at https://github.com/ChenhongyiYang/GPViT.
[ AD11 ]
[ AD11 ]

Natural and expressive human motion generation is the holy grail of computer animation.It is a challenging task, due to the diversity of possible motion, human perceptual sensitivity to it, and the difficulty of accurately describing it. Therefore, current generative solutions are either low-quality or limited in expressiveness. Diffusion models are promising candidates for the human motion domain since theyhave already shown remarkable generative capabilities in other domains, and their many-to-many nature. In this paper, we introduce Motion Diffusion Model (MDM), a carefully adapted classifier-free diffusion-based generative model for human motion data. MDM is transformer-based, combining insights from motion generation literature. A notable design-choice is that it predicts the sample itself rather than the noise in each step to facilitate the use of established geometric losses on the locations and velocities of the motion, such as the foot contact loss. As we demonstrate, MDM is a generic approach, enabling different modes of conditioning, and different generation tasks. We show that our model is trained with lightweight resources and yet achieves state-of-the-art results on leading benchmarks for text-to-motion, action-to-motion, and unconditioned motion generation.
[ AD11 ]
Neural Motion Planners (NMPs) have emerged as a promising tool for solving robot navigation tasks in complex environments. However, these methods often require expert data for learning, which limits their application to scenarios where data generation is time-consuming. Recent developments have also led to physics-informed deep neural models capable of representing complex dynamical Partial Differential Equations (PDEs). Inspired by these developments, we propose Neural Time Fields (NTFields) for robot motion planning in cluttered scenarios. Our framework represents a wave propagation model generating continuous arrival time to find path solutions informed by a nonlinear first-order PDE called Eikonal Equation. We evaluate our method in various cluttered 3D environments, including the Gibson dataset, and demonstrate its ability to solve motion planning problems for 4-DOF and 6-DOF robot manipulators where the traditional grid-based Eikonal planners often face the curse of dimensionality. Furthermore, the results show that our method exhibits high success rates and significantly lower computational times than the state-of-the-art methods, including NMPs that require training data from classical planners.
[ AD11 ]
We propose Unified-IO, a model that performs a large variety of AI tasks spanning classical computer vision tasks, including pose estimation, object detection, depth estimation and image generation, vision-and-language tasks such as region captioning and referring expression, to natural language processing tasks such as question answering and paraphrasing. Developing a single unified model for such a large variety of tasks poses unique challenges due to the heterogeneous inputs and outputs pertaining to each task, including RGB images, per-pixel maps, binary masks, bounding boxes, and language. We achieve this unification by homogenizing every supported input and output into a sequence of discrete vocabulary tokens. This common representation across all tasks allows us to train a single transformer-based architecture, jointly on over 90 diverse datasets in the vision and language fields. Unified-IO is the first model capable of performing all 7 tasks on the GRIT benchmark and produces strong results across 16 diverse benchmarks like NYUv2-Depth, ImageNet, VQA2.0, OK-VQA, Swig, VizWizGround, BoolQ, and SciTail, with no task-specific fine-tuning. Code and pre-trained models will be made publicly available.
[ AD11 ]
Recent work has shown exciting promise in updating large language models with new memories, so as to replace obsolete information or add specialized knowledge. However, this line of work is predominantly limited to updating single associations. We develop MEMIT, a method for directly updating a language model with many memories, demonstrating experimentally that it can scale up to thousands of associations for GPT-J (6B) and GPT-NeoX (20B), exceeding prior work by an order of magnitude. Our code and data will be open-sourced upon publication.
[ AD11 ]
A good automatic evaluation metric for language generation ideally correlates highly with human judgements of text quality. Yet, there is a dearth of such metrics, which inhibits the rapid and efficient progress of language generators. One exception is the recently proposed Mauve. In theory, Mauve measures an information-theoretic divergence between two probability distributions over strings: one representing the language generator under evaluation; the other representing the true natural language distribution. Mauve's authors argue that its success comes from the qualitative properties of their proposed divergence. Yet in practice, as this divergence is uncomputable, Mauve approximates it by measuring the divergence between multinomial distributions over clusters instead, where cluster assignments are attained by grouping strings based on a pretrained language model's embeddings. As we show, however, this is not a tight approximation---in either theory or practice. This begs the question: why does Mauve work so well? In this work, we show that \mauve was right for the wrong reasons, and that its newly proposed divergence is not necessary for its high performance. In fact, classical divergences paired with its proposed cluster-based approximation may actually serve as better evaluation metrics. We finish the paper with a probing analysis; this analysis leads us …
Oral 2 Track 3: Generative models Mon 1 May 03:00 p.m.
[ AD12 ]
Diffusion models have been recently studied as powerful generative inverse problem solvers, owing to their high quality reconstructions and the ease of combining existing iterative solvers. However, most works focus on solving simple linear inverse problems in noiseless settings, which significantly under-represents the complexity of real-world problems. In this work, we extend diffusion solvers to efficiently handle general noisy (non)linear inverse problems via the Laplace approximation of the posterior sampling. Interestingly, the resulting posterior sampling scheme is a blended version of diffusion sampling with the manifold constrained gradient without a strict measurement consistency projection step, yielding a more desirable generative path in noisy settings compared to the previous studies. Our method demonstrates that diffusion models can incorporate various measurement noise statistics such as Gaussian and Poisson, and also efficiently handle noisy nonlinear inverse problems such as Fourier phase retrieval and non-uniform deblurring.
[ AD12 ]
Recent large-scale text-driven synthesis diffusion models have attracted much attention thanks to their remarkable capabilities of generating highly diverse images that follow given text prompts. Therefore, it is only natural to build upon these synthesis models to provide text-driven image editing capabilities. However, Editing is challenging for these generative models, since an innate property of an editing technique is to preserve some content from the original image, while in the text-based models, even a small modification of the text prompt often leads to a completely different outcome. State-of-the-art methods mitigate this by requiring the users to provide a spatial mask to localize the edit, hence, ignoring the original structure and content within the masked region. In this paper, we pursue an intuitive prompt-to-prompt editing framework, where the edits are controlled by text only. We analyze a text-conditioned model in depth and observe that the cross-attention layers are the key to controlling the relation between the spatial layout of the image to each word in the prompt. With this observation, we propose to control the attention maps along the diffusion process. Our approach enables us to monitor the synthesis process by editing the textual prompt only, paving the way to a …
[ AD12 ]

Modern applications increasingly require learning and forecasting latent dynamics from high-dimensional time-series. Compared to univariate time-series forecasting, this adds a new challenge of reasoning about the latent dynamics of an unobserved abstract state. Sequential latent variable models (LVMs) present an attractive solution, although existing works either struggle with long-term forecasting or have difficulty learning across diverse dynamics. In this paper, we first present a conceptual framework of sequential LVMs to unify existing works, contrast their fundamental limitations, and identify an intuitive solution to long-term forecasting for diverse dynamics via meta-learning. We then present the first framework of few-shot forecasting for high-dimensional time-series: instead of learning a single dynamic function, we leverage data of diverse dynamics and learn to adapt latent dynamic functions to few-shot support series. This is realized via Bayesian meta-learning underpinned by: 1) a latent dynamic function conditioned on knowledge derived from few-shot support series, and 2) a meta-model that learns to extract such dynamic-specific knowledge via feed-forward embedding of support set. We compared the presented framework with a comprehensive set of baseline models trained 1) globally on the large meta-training set with diverse dynamics, and 2) individually on single dynamics, both with and without fine-tuning to k-shot …
[ AD12 ]
Diffusion models achieve outstanding generative performance in various domains. Despite their great success, they lack semantic latent space which is essential for controlling the generative process. To address the problem, we propose asymmetric reverse process (Asyrp) which discovers the semantic latent space in frozen pretrained diffusion models. Our semantic latent space, named h-space, has nice properties for accommodating semantic image manipulation: homogeneity, linearity, robustness, and consistency across timesteps. In addition, we measure editing strength and quality deficiency of a generative process at timesteps to provide a principled design of the process for versatility and quality improvements. Our method is applicable to various architectures (DDPM++, iDDPM, and ADM) and datasets (CelebA-HQ, AFHQ-dog, LSUN-church, LSUN-bedroom, and METFACES).
[ AD12 ]
Recent breakthroughs in text-to-image synthesis have been driven by diffusion models trained on billions of image-text pairs. Adapting this approach to 3D synthesis would require large-scale datasets of labeled 3D or multiview data and efficient architectures for denoising 3D data, neither of which currently exist. In this work, we circumvent these limitations by using a pretrained 2D text-to-image diffusion model to perform text-to-3D synthesis. We introduce a loss based on probability density distillation that enables the use of a 2D diffusion model as a prior for optimization of a parametric image generator. Using this loss in a DeepDream-like procedure, we optimize a randomly-initialized 3D model (a Neural Radiance Field, or NeRF) via gradient descent such that its 2D renderings from random angles achieve a low loss. The resulting 3D model of the given text can be viewed from any angle, relit by arbitrary illumination, or composited into any 3D environment. Our approach requires no 3D training data and no modifications to the image diffusion model, demonstrating the effectiveness of pretrained image diffusion models as priors.
[ AD12 ]
Oral 2 Track 4: Reinforcement Learning Mon 1 May 03:00 p.m.
[ AD10 ]
We study a modular approach to tackle long-horizon mobile manipulation tasks for object rearrangement, which decomposes a full task into a sequence of subtasks. To tackle the entire task, prior work chains multiple stationary manipulation skills with a point-goal navigation skill, which are learned individually on subtasks. Although more effective than monolithic end-to-end RL policies, this framework suffers from compounding errors in skill chaining, e.g., navigating to a bad location where a stationary manipulation skill can not reach its target to manipulate. To this end, we propose that the manipulation skills should include mobility to have flexibility in interacting with the target object from multiple locations and at the same time the navigation skill could have multiple end points which lead to successful manipulation. We operationalize these ideas by implementing mobile manipulation skills rather than stationary ones and training a navigation skill trained with region goal instead of point goal. We evaluate our multi-skill mobile manipulation method M3 on 3 challenging long-horizon mobile manipulation tasks in the Home Assistant Benchmark (HAB), and show superior performance as compared to the baselines.
[ AD10 ]

Extensive work has demonstrated that equivariant neural networks can significantly improve sample efficiency and generalization by enforcing an inductive bias in the network architecture. These applications typically assume that the domain symmetry is fully described by explicit transformations of the model inputs and outputs. However, many real-life applications contain only latent or partial symmetries which cannot be easily described by simple transformations of the input. In these cases, it is necessary to learn symmetry in the environment instead of imposing it mathematically on the network architecture. We discover, surprisingly, that imposing equivariance constraints that do not exactly match the domain symmetry is very helpful in learning the true symmetry in the environment. We differentiate between extrinsic and incorrect symmetry constraints and show that while imposing incorrect symmetry can impede the model's performance, imposing extrinsic symmetry can actually improve performance. We demonstrate that an equivariant model can significantly outperform non-equivariant methods on domains with latent symmetries both in supervised learning and in reinforcement learning for robotic manipulation and control problems.
[ AD10 ]

The rise of generalist large-scale models in natural language and vision has made us expect that a massive data-driven approach could achieve broader generalization in other domains such as continuous control. In this work, we explore a method for learning a single policy that manipulates various forms of agents to solve various tasks by distilling a large amount of proficient behavioral data. In order to align input-output (IO) interface among multiple tasks and diverse agent morphologies while preserving essential 3D geometric relations, we introduce morphology-task graph, which treats observations, actions and goals/task in a unified graph representation. We also develop MxT-Bench for fast large-scale behavior generation, which supports procedural generation of diverse morphology-task combinations with a minimal blueprint and hardware-accelerated simulator. Through efficient representation and architecture selection on MxT-Bench, we find out that a morphology-task graph representation coupled with Transformer architecture improves the multi-task performances compared to other baselines including recent discrete tokenization, and provides better prior knowledge for zero-shot transfer or sample efficiency in downstream multi-task imitation learning. Our work suggests large diverse offline datasets, unified IO representation, and policy representation and architecture selection through supervised learning form a promising approach for studying and advancing morphology-task generalization.
[ AD10 ]
Increasing the replay ratio, the number of updates of an agent's parameters per environment interaction, is an appealing strategy for improving the sample efficiency of deep reinforcement learning algorithms. In this work, we show that fully or partially resetting the parameters of deep reinforcement learning agents causes better replay ratio scaling capabilities to emerge. We push the limits of the sample efficiency of carefully-modified algorithms by training them using an order of magnitude more updates than usual, significantly improving their performance in the Atari 100k and DeepMind Control Suite benchmarks. We then provide an analysis of the design choices required for favorable replay ratio scaling to be possible and discuss inherent limits and tradeoffs.
[ AD10 ]
One of the grand challenges of reinforcement learning is the ability to generalize to new tasks. However, general agents require a set of rich, diverse tasks to train on. Designing a `foundation environment' for such tasks is tricky -- the ideal environment would support a range of emergent phenomena, an expressive task space, and fast runtime. To take a step towards addressing this research bottleneck, this work presents Powderworld, a lightweight yet expressive simulation environment running directly on the GPU. Within Powderworld, two motivating task distributions are presented, one for world-modelling and one for reinforcement learning. Each contains hand-designed test tasks to examine generalization. Experiments indicate that increasing the environment's complexity improves generalization for world models, yet causes reinforcement learning agents to struggle. Powderworld aims to support the study of generalization by providing a source of diverse tasks arising from the same core rules.
[ AD10 ]

Many real-world reinforcement learning tasks require control of complex dynamical systems that involve both costly data acquisition processes and large state spaces. In cases where the expensive transition dynamics can be readily evaluated at specified states (e.g., via a simulator), agents can operate in what is often referred to as planning with a \emph{generative model}. We propose the AE-LSVI algorithm for best policy identification, a novel variant of the kernelized least-squares value iteration (LSVI) algorithm that combines optimism with pessimism for active exploration (AE). AE-LSVI provably identifies a near-optimal policy \emph{uniformly} over an entire state space and achieves polynomial sample complexity guarantees that are independent of the number of states. When specialized to the recently introduced offline contextual Bayesian optimization setting, our algorithm achieves improved sample complexity bounds. Experimentally, we demonstrate that AE-LSVI outperforms other RL algorithms in a variety of environments when robustness to the initial state is required.
[ AD10 ]
How well do reward functions learned with inverse reinforcement learning (IRL) generalize? We illustrate that state-of-the-art IRL algorithms, which maximize a maximum-entropy objective, learn rewards that overfit to the demonstrations. Such rewards struggle to provide meaningful rewards for states not covered by the demonstrations, a major detriment when using the reward to learn policies in new situations. We introduce BC-IRL a new inverse reinforcement learning method that learns reward functions that generalize better when compared to maximum-entropy IRL approaches. In contrast to the MaxEnt framework, which learns to maximize rewards around demonstrations, BC-IRL updates reward parameters such that the policy trained with the new reward matches the expert demonstrations better. We show that BC-IRL learns rewards that generalize better on an illustrative simple task and two continuous robotic control tasks, achieving over twice the success rate of baselines in challenging generalization settings.
[ AD10 ]
Many important tasks involve some notion of long-term progress in multiple phases: e.g. to clean a shelf it must be cleared of items, cleaning products applied, and then the items placed back on the shelf. In this work, we explore the use of expert demonstrations in long-horizon tasks to learn a monotonically increasing function that summarizes progress. This function can then be used to aid agent exploration in environments with sparse rewards. As a case study we consider the NetHack environment, which requires long-term progress at a variety of scales and is far from being solved by existing approaches. In this environment, we demonstrate that by learning a model of long-term progress from expert data containing only observations, we can achieve efficient exploration in challenging sparse tasks, well beyond what is possible with current state-of-the-art approaches. We have made the curated gameplay dataset used in this work available at https://github.com/deepmind/nao_top10.
Oral 2 Track 2: General Machine Learning Mon 1 May 03:00 p.m.
[ Auditorium ]
[ Auditorium ]

Modern machine learning research relies on relatively few carefully curated datasets. Even in these datasets, and typically in `untidy' or raw data, practitioners are faced with significant issues of data quality and diversity which can be prohibitively labor intensive to address. Existing methods for dealing with these challenges tend to make strong assumptions about the particular issues at play, and often require a priori knowledge or metadata such as domain labels. Our work is orthogonal to these methods: we instead focus on providing a unified and efficient framework for Metadata Archaeology -- uncovering and inferring metadata of examples in a dataset. We curate different subsets of data that might exist in a dataset (e.g. mislabeled, atypical, or out-of-distribution examples) using simple transformations, and leverage differences in learning dynamics between these probe suites to infer metadata of interest. Our method is on par with far more sophisticated mitigation methods across different tasks: identifying and correcting mislabeled examples, classifying minority-group samples, prioritizing points relevant for training and enabling scalable human auditing of relevant examples.
[ Auditorium ]
Motivated by various practical applications, we propose a novel and general formulation of targeted multi-objective hyperparameter optimization. Our formulation allows a clear specification of an automatable optimization goal using lexicographic preference over multiple objectives. We then propose a randomized directed search method named LexiFlow to solve this problem. We demonstrate the strong empirical performance of the proposed algorithm in multiple hyperparameter optimization tasks.
[ Auditorium ]

[ Auditorium ]
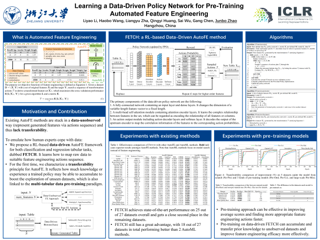
Feature engineering is widely acknowledged to be pivotal in tabular data analysis and prediction. Automated feature engineering (AutoFE) emerged to automate this process managed by experienced data scientists and engineers conventionally. In this area, most — if not all — prior work adopted an identical framework from the neural architecture search (NAS) method. While feasible, we posit that the NAS framework very much contradicts the way how human experts cope with the data since the inherent Markov decision process (MDP) setup differs. We point out that its data-unobserved setup consequentially results in an incapability to generalize across different datasets as well as also high computational cost. This paper proposes a novel AutoFE framework Feature Set Data-Driven Search (FETCH), a pipeline mainly for feature generation and selection. Notably, FETCH is built on a brand-new data-driven MDP setup using the tabular dataset as the state fed into the policy network. Further, we posit that the crucial merit of FETCH is its transferability where the yielded policy network trained on a variety of datasets is indeed capable to enact feature engineering on unseen data, without requiring additional exploration. To the best of our knowledge, this is a pioneer attempt to build a tabular …
[ Auditorium ]

The integration of hard constraints on neural network outputs is a very desirable capability. This allows to instill trust in AI by guaranteeing the sanity of that neural network predictions with respect to domain knowledge. Recently, this topic has received a lot of attention. However, all the existing methods usually either impose the constraints in a "weak" form at training time, with no guarantees at inference, or fail to provide a general framework that supports different tasks and constraint types. We tackle this open problem from a neuro-symbolic perspective. Our pipeline enhances a conventional neural predictor with (1) a symbolic reasoning module capable of correcting structured prediction errors and (2) a neural attention module that learns to direct the reasoning effort to focus on potential prediction errors, while keeping other outputs unchanged. This framework provides an appealing trade-off between the efficiency of constraint-free neural inference and the prohibitive cost of exhaustive reasoning at inference time. We show that our method outperforms the state of the art on visual-Sudoku, and can also benefit visual scene graph prediction. Furthermore, it can improve the performance of existing neuro-symbolic systems that lack our explicit reasoning during inference.
Oral 2 Track 6: Applications & Social Aspects of Machine Learning Mon 1 May 03:00 p.m.
[ AD1 ]
Reliable application of machine learning-based decision systems in the wild is one of the major challenges currently investigated by the field. A large portion of established approaches aims to detect erroneous predictions by means of assigning confidence scores. This confidence may be obtained by either quantifying the model's predictive uncertainty, learning explicit scoring functions, or assessing whether the input is in line with the training distribution. Curiously, while these approaches all state to address the same eventual goal of detecting failures of a classifier upon real-world application, they currently constitute largely separated research fields with individual evaluation protocols, which either exclude a substantial part of relevant methods or ignore large parts of relevant failure sources. In this work, we systematically reveal current pitfalls caused by these inconsistencies and derive requirements for a holistic and realistic evaluation of failure detection. To demonstrate the relevance of this unified perspective, we present a large-scale empirical study for the first time enabling benchmarking confidence scoring functions w.r.t all relevant methods and failure sources. The revelation of a simple softmax response baseline as the overall best performing method underlines the drastic shortcomings of current evaluation in the plethora of publicized research on confidence scoring. Code …
[ AD1 ]
[ AD1 ]
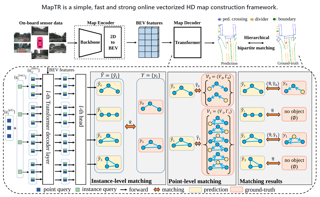
[ AD1 ]
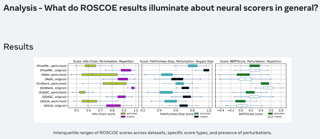
Large language models show improved downstream task performance when prompted to generate step-by-step reasoning to justify their final answers. These reasoning steps greatly improve model interpretability and verification, but objectively studying their correctness (independent of the final answer) is difficult without reliable methods for automatic evaluation. We simply do not know how often the stated reasoning steps actually support the final end task predictions. In this work, we present ROSCOE, a suite of interpretable, unsupervised automatic scores that improve and extend previous text generation evaluation metrics. To evaluate ROSCOE against baseline metrics, we design a typology of reasoning errors and collect synthetic and human evaluation scores on commonly used reasoning datasets. In contrast with existing metrics, ROSCOE can measure semantic consistency, logicality, informativeness, fluency, and factuality — among other traits — by leveraging properties of step-by-step rationales. We empirically verify the strength of our metrics on five human annotated and six programmatically perturbed diagnostics datasets - covering a diverse set of tasks that require reasoning skills and show that ROSCOE can consistently outperform baseline metrics.
[ AD1 ]

Large language models (LLMs) transfer well to new tasks out-of-the-box simply given a natural language prompt that demonstrates how to perform the task and no additional training. Prompting is a brittle process wherein small modifications to the prompt can cause large variations in the model predictions, and therefore significant effort is dedicated towards designing a painstakingly crafted "perfect prompt" for a task. To mitigate the high degree of effort, we instead ask whether collecting multiple decent, yet imperfect, prompts and aggregating them can lead to a high quality prompting strategy. Our observations motivate our proposed method, Ask Me Anything (AMA). We first develop an understanding of the effective prompt formats, finding question-answering (QA) prompts, which encourage open-ended generation ("Who went to the park?") tend to outperform those that restrict the model outputs ("John went to the park. True or False?"). AMA recursively uses the LLM to transform task inputs to the effective QA format. AM generates multiple questions per input and applies these prompts to collect several noisy "votes" for the input's true label. We find the prompts have varying accuracies and dependencies and thus propose to use weak supervision, a procedure for combining the noisy predictions, to produce the …
[ AD1 ]

In this paper, we leverage low-level compiler intermediate representations (IR) code translation. Traditional transpilers rely on syntactic information and handcrafted rules, which limits their applicability and produces unnatural-looking code. Applying neural machine translation (NMT) approaches to code has successfully broadened the set of programs on which one can get a natural-looking translation. However, they treat the code as sequences of text tokens, and still do not differentiate well enough between similar pieces of code which have different semantics in different languages. The consequence is low quality translation, reducing the practicality of NMT, and stressing the need for an approach significantly increasing its accuracy. Here we propose to augment code translation with IRs, specifically LLVM IR, with results on the C++, Java, Rust, and Go languages. Our method improves upon the state of the art for unsupervised code translation, increasing the number of correct translations by 11% on average, and up to 79% for the Java → Rust pair with greedy decoding. With beam search, it increases the number of correct translations by 5.5% in average. We extend previous test sets for code translation, by adding hundreds of Go and Rust functions. Additionally, we train models with high performance on the …
[ AD1 ]
Simultaneous machine translation (SiMT) outputs the target sequence while receiving the source sequence, and hence learning when to start translating each target token is the core challenge for SiMT task. However, it is non-trivial to learn the optimal moment among many possible moments of starting translating, as the moments of starting translating always hide inside the model and can only be supervised with the observed target sequence. In this paper, we propose a Hidden Markov Transformer (HMT), which treats the moments of starting translating as hidden events and the target sequence as the corresponding observed events, thereby organizing them as a hidden Markov model. HMT explicitly models multiple moments of starting translating as the candidate hidden events, and then selects one to generate the target token. During training, by maximizing the marginal likelihood of the target sequence over multiple moments of starting translating, HMT learns to start translating at the moments that target tokens can be generated more accurately. Experiments on multiple SiMT benchmarks show that HMT outperforms strong baselines and achieves state-of-the-art performance.
[ AD1 ]
Large language models (LLMs) have been shown to be capable of impressive few-shot generalisation to new tasks. However, they still tend to perform poorly on multi-step logical reasoning problems. Here we carry out a comprehensive evaluation of LLMs on 46 tasks that probe different aspects of logical reasoning. We show that language models tend to perform fairly well at single step inference or entailment tasks, but struggle to chain together multiple reasoning steps to solve more complex problems. In light of this, we propose a Selection-Inference (SI) framework that exploits pre-trained LLMs as general processing modules, and alternates between selection and inference to generate a series of interpretable, casual reasoning steps leading to the final answer. We show that a 7B parameter LLM used within the SI framework in a 5-shot generalisation setting, with no fine-tuning, yields a performance improvement of over 100% compared to an equivalent vanilla baseline on a suite of 10 logical reasoning tasks. The same model in the same setting even outperforms a significantly larger 280B parameter baseline on the same suite of tasks. Moreover, answers produced by the SI framework are accompanied by a causal natural-language-based reasoning trace, which has important implications for the safety …
Oral 2 Track 5: Generative models & Theory Mon 1 May 03:00 p.m.
[ AD4 ]
We present a novel neural-networks-based algorithm to compute optimal transport maps and plans for strong and weak transport costs. To justify the usage of neural networks, we prove that they are universal approximators of transport plans between probability distributions. We evaluate the performance of our optimal transport algorithm on toy examples and on the unpaired image-to-image translation.
[ AD4 ]
[ AD4 ]
[ AD4 ]
Content creators compete for user attention. Their reach crucially depends on algorithmic choices made by developers on online platforms. To maximize exposure, many creators adapt strategically, as evidenced by examples like the sprawling search engine optimization industry. This begets competition for the finite user attention pool. We formalize these dynamics in what we call an exposure game, a model of incentives induced by modern algorithms including factorization and (deep) two-tower architectures. We prove that seemingly innocuous algorithmic choices—e.g., non-negative vs. unconstrained factorization—significantly affect the existence and character of (Nash) equilibria in exposure games. We proffer use of creator behavior models like ours for an (ex-ante) pre-deployment audit. Such an audit can identify misalignment between desirable and incentivized content, and thus complement post-hoc measures like content filtering and moderation. To this end, we propose tools for numerically finding equilibria in exposure games, and illustrate results of an audit on the MovieLens and LastFM datasets. Among else, we find that the strategically produced content exhibits strong dependence between algorithmic exploration and content diversity, and between model expressivity and bias towards gender-based user and creator groups.
[ AD4 ]
With the advent of large datasets, offline reinforcement learning is a promising framework for learning good decision-making policies without the need to interact with the real environment.However, offline RL requires the dataset to be reward-annotated, which presents practical challenges when reward engineering is difficult or when obtaining reward annotations is labor-intensive.In this paper, we introduce Optimal Transport Relabeling (OTR), an imitation learning algorithm that can automatically relabel offline data of mixed and unknown quality with rewards from a few good demonstrations. OTR's key idea is to use optimal transport to compute an optimal alignment between an unlabeled trajectory in the dataset and an expert demonstration to obtain a similarity measure that can be interpreted as a reward, which can then be used by an offline RL algorithm to learn the policy. OTR is easy to implement and computationally efficient. On D4RL benchmarks, we demonstrate that OTR with a single demonstration can consistently match the performance of offline RL with ground-truth rewards.
Poster Session 2 Mon 1 May 04:30 p.m.
[ MH1-2-3-4 ]
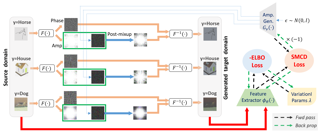
We tackle the domain generalisation (DG) problem by posing it as a domain adaptation (DA) task where we adversarially synthesise the worst-case `target' domain and adapt a model to that worst-case domain, thereby improving the model’s robustness. To synthesise data that is challenging yet semantics-preserving, we generate Fourier amplitude images and combine them with source domain phase images, exploiting the widely believed conjecture from signal processing that amplitude spectra mainly determines image style, while phase data mainly captures image semantics. To synthesise a worst-case domain for adaptation, we train the classifier and the amplitude generator adversarially. Specifically, we exploit the maximum classifier discrepancy (MCD) principle from DA that relates the target domain performance to the discrepancy of classifiers in the model hypothesis space. By Bayesian hypothesis modeling, we express the model hypothesis space effectively as a posterior distribution over classifiers given the source domains, making adversarial MCD minimisation feasible. On the DomainBed benchmark including the large-scale DomainNet dataset, the proposed approach yields significantly improved domain generalisation performance over the state-of-the-art.
[ MH1-2-3-4 ]

Mathematical reasoning, a core ability of human intelligence, presents unique challenges for machines in abstract thinking and logical reasoning. Recent large pre-trained language models such as GPT-3 have achieved remarkable progress on mathematical reasoning tasks written in text form, such as math word problems (MWP). However, it is unknown if the models can handle more complex problems that involve math reasoning over heterogeneous information, such as tabular data. To fill the gap, we present Tabular Math Word Problems (TabMWP), a new dataset containing 38,431 open-domain grade-level problems that require mathematical reasoning on both textual and tabular data. Each question in TabMWP is aligned with a tabular context, which is presented as an image, semi-structured text, and a structured table. There are two types of questions: free-text and multi-choice, and each problem is annotated with gold solutions to reveal the multi-step reasoning process. We evaluate different pre-trained models on TabMWP, including the GPT-3 model in a few-shot setting. As earlier studies suggest, since few-shot GPT-3 relies on the selection of in-context examples, its performance is unstable and can degrade to near chance. The unstable issue is more severe when handling complex problems like TabMWP. To mitigate this, we further propose a …
[ MH1-2-3-4 ]
Image restoration aims to reconstruct the latent sharp image from its corrupted counterpart. Besides dealing with this long-standing task in the spatial domain, a few approaches seek solutions in the frequency domain in consideration of the large discrepancy between spectra of sharp/degraded image pairs. However, these works commonly utilize transformation tools, e.g., wavelet transform, to split features into several frequency parts, which is not flexible enough to select the most informative frequency component to recover. In this paper, we exploit a multi-branch and content-aware module to decompose features into separate frequency subbands dynamically and locally, and then accentuate the useful ones via channel-wise attention weights. In addition, to handle large-scale degradation blurs, we propose an extremely simple decoupling and modulation module to enlarge the receptive field via global and window-based average pooling. Integrating two developed modules into a U-Net backbone, the proposed Selective Frequency Network (SFNet) performs favorably against state-of-the-art algorithms on five image restoration tasks, including single-image defocus deblurring, image dehazing, image motion deblurring, image desnowing, and image deraining.
[ MH1-2-3-4 ]

Recently, there has been a growing surge of interest in enabling machine learning systems to generalize well to Out-of-Distribution (OOD) data. Most efforts are devoted to advancing optimization objectives that regularize models to capture the underlying invariance; however, there often are compromises in the optimization process of these OOD objectives: i) Many OOD objectives have to be relaxed as penalty terms of Empirical Risk Minimization (ERM) for the ease of optimization, while the relaxed forms can weaken the robustness of the original objective; ii) The penalty terms also require careful tuning of the penalty weights due to the intrinsic conflicts between ERM and OOD objectives. Consequently, these compromises could easily lead to suboptimal performance of either the ERM or OOD objective. To address these issues, we introduce a multi-objective optimization (MOO) perspective to understand the OOD optimization process, and propose a new optimization scheme called PAreto Invariant Risk Minimization (PAIR). PAIR improves the robustness of OOD objectives by cooperatively optimizing with other OOD objectives, thereby bridging the gaps caused by the relaxations. Then PAIR approaches a Pareto optimal solution that trades off the ERM and OOD objectives properly. Extensive experiments on challenging benchmarks, WILDS, show that PAIR alleviates the compromises …
[ MH1-2-3-4 ]

Humans excel at lifelong learning, as the brain has evolved to be robust to distribution shifts and noise in our ever-changing environment. Deep neural networks (DNNs), however, exhibit catastrophic forgetting and the learned representations drift drastically as they encounter a new task. This alludes to a different error-based learning mechanism in the brain. Unlike DNNs, where learning scales linearly with the magnitude of the error, the sensitivity to errors in the brain decreases as a function of their magnitude. To this end, we propose "ESMER" which employs a principled mechanism to modulate error sensitivity in a dual-memory rehearsal-based system. Concretely, it maintains a memory of past errors and uses it to modify the learning dynamics so that the model learns more from small consistent errors compared to large sudden errors. We also propose "Error-Sensitive Reservoir Sampling" to maintain episodic memory, which leverages the error history to pre-select low-loss samples as candidates for the buffer, which are better suited for retaining information. Empirical results show that ESMER effectively reduces forgetting and abrupt drift in representations at the task boundary by gradually adapting to the new task while consolidating knowledge. Remarkably, it also enables the model to learn under high levels of …
[ MH1-2-3-4 ]
We study the task of prompting large-scale language models to perform multi-step reasoning. Existing work shows that when prompted with a chain of thoughts (CoT), sequences of short sentences describing intermediate reasoning steps towards a final answer, large language models can generate new reasoning chains and predict answers for new inputs. A central question is which reasoning examples make the most effective prompts. In this work, we propose complexity-based prompting, a simple and effective example selection scheme for multi-step reasoning. We show that prompts with higher reasoning complexity, i.e., chains with more reasoning steps, achieve substantially better performance on math word reasoning tasks over strong baselines. We further extend our complexity-based criteria from prompting (selecting inputs) to decoding (selecting outputs), where we sample multiple reasoning chains from the model, then choose the majorityof generated answers from complex reasoning chains (over simple chains). When used to prompt GPT-3, our approach substantially improves multi-step reasoning accuracy, with an 8.6% absolute improvement on GSM8K, and 6.4% on MathQA. Compared with existing example selection schemes like manual tuning or retrieval-based selection, selection based on reasoning complexity is intuitive, easy to implement, and annotation-efficient. Further results demonstrate the robustness of performance gains from complex prompts …
[ MH1-2-3-4 ]
Large language models (LLMs) have shown remarkable reasoning capabilities given chain-of-thought prompts (examples with intermediate reasoning steps). Existing benchmarks measure reasoning ability indirectly, by evaluating accuracy on downstream tasks such as mathematical reasoning. However, it is unclear how these models obtain the answers and whether they rely on simple heuristics rather than the generated chain-of-thought. To enable systematic exploration of the reasoning ability of LLMs, we present a new synthetic question-answering dataset called PrOntoQA, where each example is generated from a synthetic world model represented in first-order logic. This allows us to parse the generated chain-of-thought into symbolic proofs for formal analysis. Our analysis on InstructGPT and GPT-3 shows that LLMs are quite capable of making correct individual deduction steps, and so are generally capable of reasoning, even in fictional contexts. However, they have difficulty with proof planning: When multiple valid deduction steps are available, they are not able to systematically explore the different options.
[ MH1-2-3-4 ]
Large language models (LLMs) transfer well to new tasks out-of-the-box simply given a natural language prompt that demonstrates how to perform the task and no additional training. Prompting is a brittle process wherein small modifications to the prompt can cause large variations in the model predictions, and therefore significant effort is dedicated towards designing a painstakingly crafted "perfect prompt" for a task. To mitigate the high degree of effort, we instead ask whether collecting multiple decent, yet imperfect, prompts and aggregating them can lead to a high quality prompting strategy. Our observations motivate our proposed method, Ask Me Anything (AMA). We first develop an understanding of the effective prompt formats, finding question-answering (QA) prompts, which encourage open-ended generation ("Who went to the park?") tend to outperform those that restrict the model outputs ("John went to the park. True or False?"). AMA recursively uses the LLM to transform task inputs to the effective QA format. AM generates multiple questions per input and applies these prompts to collect several noisy "votes" for the input's true label. We find the prompts have varying accuracies and dependencies and thus propose to use weak supervision, a procedure for combining the noisy predictions, to produce the …
[ MH1-2-3-4 ]
Natural and expressive human motion generation is the holy grail of computer animation.It is a challenging task, due to the diversity of possible motion, human perceptual sensitivity to it, and the difficulty of accurately describing it. Therefore, current generative solutions are either low-quality or limited in expressiveness. Diffusion models are promising candidates for the human motion domain since theyhave already shown remarkable generative capabilities in other domains, and their many-to-many nature. In this paper, we introduce Motion Diffusion Model (MDM), a carefully adapted classifier-free diffusion-based generative model for human motion data. MDM is transformer-based, combining insights from motion generation literature. A notable design-choice is that it predicts the sample itself rather than the noise in each step to facilitate the use of established geometric losses on the locations and velocities of the motion, such as the foot contact loss. As we demonstrate, MDM is a generic approach, enabling different modes of conditioning, and different generation tasks. We show that our model is trained with lightweight resources and yet achieves state-of-the-art results on leading benchmarks for text-to-motion, action-to-motion, and unconditioned motion generation.
[ MH1-2-3-4 ]
Neural Motion Planners (NMPs) have emerged as a promising tool for solving robot navigation tasks in complex environments. However, these methods often require expert data for learning, which limits their application to scenarios where data generation is time-consuming. Recent developments have also led to physics-informed deep neural models capable of representing complex dynamical Partial Differential Equations (PDEs). Inspired by these developments, we propose Neural Time Fields (NTFields) for robot motion planning in cluttered scenarios. Our framework represents a wave propagation model generating continuous arrival time to find path solutions informed by a nonlinear first-order PDE called Eikonal Equation. We evaluate our method in various cluttered 3D environments, including the Gibson dataset, and demonstrate its ability to solve motion planning problems for 4-DOF and 6-DOF robot manipulators where the traditional grid-based Eikonal planners often face the curse of dimensionality. Furthermore, the results show that our method exhibits high success rates and significantly lower computational times than the state-of-the-art methods, including NMPs that require training data from classical planners.
[ MH1-2-3-4 ]
A good automatic evaluation metric for language generation ideally correlates highly with human judgements of text quality. Yet, there is a dearth of such metrics, which inhibits the rapid and efficient progress of language generators. One exception is the recently proposed Mauve. In theory, Mauve measures an information-theoretic divergence between two probability distributions over strings: one representing the language generator under evaluation; the other representing the true natural language distribution. Mauve's authors argue that its success comes from the qualitative properties of their proposed divergence. Yet in practice, as this divergence is uncomputable, Mauve approximates it by measuring the divergence between multinomial distributions over clusters instead, where cluster assignments are attained by grouping strings based on a pretrained language model's embeddings. As we show, however, this is not a tight approximation---in either theory or practice. This begs the question: why does Mauve work so well? In this work, we show that \mauve was right for the wrong reasons, and that its newly proposed divergence is not necessary for its high performance. In fact, classical divergences paired with its proposed cluster-based approximation may actually serve as better evaluation metrics. We finish the paper with a probing analysis; this analysis leads us …
[ MH1-2-3-4 ]
Deep neural networks are likely to fail when the test data is corrupted in real-world deployment (e.g., blur, weather, etc.). Test-time optimization is an effective way that adapts models to generalize to corrupted data during testing, which has been shown in the image domain. However, the techniques for improving video classification corruption robustness remain few. In this work, we propose a Temporal Coherent Test-time Optimization framework (TeCo) to utilize spatio-temporal information in test-time optimization for robust video classification. To exploit information in video with self-supervised learning, TeCo minimizes the entropy of the prediction based on the global content from video clips. Meanwhile, it also feeds local content to regularize the temporal coherence at the feature level. TeCo retains the generalization ability of various video classification models and achieves significant improvements in corruption robustness across Mini Kinetics-C and Mini SSV2-C. Furthermore, TeCo sets a new baseline in video classification corruption robustness via test-time optimization.
[ MH1-2-3-4 ]
We propose Unified-IO, a model that performs a large variety of AI tasks spanning classical computer vision tasks, including pose estimation, object detection, depth estimation and image generation, vision-and-language tasks such as region captioning and referring expression, to natural language processing tasks such as question answering and paraphrasing. Developing a single unified model for such a large variety of tasks poses unique challenges due to the heterogeneous inputs and outputs pertaining to each task, including RGB images, per-pixel maps, binary masks, bounding boxes, and language. We achieve this unification by homogenizing every supported input and output into a sequence of discrete vocabulary tokens. This common representation across all tasks allows us to train a single transformer-based architecture, jointly on over 90 diverse datasets in the vision and language fields. Unified-IO is the first model capable of performing all 7 tasks on the GRIT benchmark and produces strong results across 16 diverse benchmarks like NYUv2-Depth, ImageNet, VQA2.0, OK-VQA, Swig, VizWizGround, BoolQ, and SciTail, with no task-specific fine-tuning. Code and pre-trained models will be made publicly available.
[ MH1-2-3-4 ]
Recent work has shown exciting promise in updating large language models with new memories, so as to replace obsolete information or add specialized knowledge. However, this line of work is predominantly limited to updating single associations. We develop MEMIT, a method for directly updating a language model with many memories, demonstrating experimentally that it can scale up to thousands of associations for GPT-J (6B) and GPT-NeoX (20B), exceeding prior work by an order of magnitude. Our code and data will be open-sourced upon publication.
[ MH1-2-3-4 ]
Finding the best way to schedule operations in a computation graph is a classical NP-hard problem which is central to compiler optimization. However, evaluating the goodness of a schedule on the target hardware can be very time-consuming. Traditional approaches as well as previous machine learning ones typically optimize proxy metrics, which are fast to evaluate but can lead to bad schedules when tested on the target hardware. In this work, we propose a new approach to scheduling by sampling proportionally to the proxy metric using a novel GFlowNet method. We introduce a technique to control the trade-off between diversity and goodness of the proposed schedules at inference time and demonstrate empirically that the pure optimization baselines can lead to subpar performance with respect to our approach when tested on a target model. Furthermore, we show that conditioning the GFlowNet on the computation graph enables generalization to unseen scheduling problems for both synthetic and real-world compiler datasets.
[ MH1-2-3-4 ]
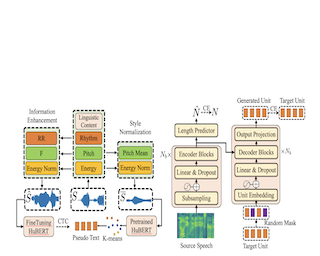
Direct speech-to-speech translation (S2ST) with discrete units leverages recent progress in speech representation learning. Specifically, a sequence of discrete representations derived in a self-supervised manner are predicted from the model and passed to a vocoder for speech reconstruction, while still facing the following challenges: 1) Acoustic multimodality: the discrete units derived from speech with same content could be indeterministic due to the acoustic property (e.g., rhythm, pitch, and energy), which causes deterioration of translation accuracy; 2) high latency: current S2ST systems utilize autoregressive models which predict each unit conditioned on the sequence previously generated, failing to take full advantage of parallelism. In this work, we propose TranSpeech, a speech-to-speech translation model with bilateral perturbation. To alleviate the acoustic multimodal problem, we propose bilateral perturbation (BiP), which consists of the style normalization and information enhancement stages, to learn only the linguistic information from speech samples and generate more deterministic representations. With reduced multimodality, we step forward and become the first to establish a non-autoregressive S2ST technique, which repeatedly masks and predicts unit choices and produces high-accuracy results in just a few cycles. Experimental results on three language pairs demonstrate that BiP yields an improvement of 2.9 BLEU on average compared with …
[ MH1-2-3-4 ]

Fast and accurate adaptation of automatic speech recognition (ASR) systems using only text data in the target domain is a problem of long-standing practical relevance. Text-only adaptation was easy in traditional cascaded ASR systems with completely decoupled acoustic and language models. Recently, the RNNTransducer (RNN-T) has emerged as a default ASR model because of its high accuracy, low latency, and capability of supporting streaming input. However text-only adaptation of the RNN-T model is significantly more challenging due to its tight integration of acoustic and language models and end-to-end training. Existing recent approaches for text-only adaptation of RNN-Ts, either entail significant modification to the network or introduce high latency during decoding. We propose a new approach (TOLSTOI) that imputes speech representations internal to a baseline RNN-T, starting from text-only inputs, and performs in-situ adaptation that results in higher adaptation accuracy without any runtime overheads during decoding. Our imputation model is a function of the labeled data and trained parameters of the ASR model, and that we show, is more effective in controlling catastrophic forgetting compared to existing methods. We establish the effectiveness of TOLSTOI using three target domains and two ASR models of varying complexity. We yield up to 35% relative …
[ MH1-2-3-4 ]
Reliable application of machine learning-based decision systems in the wild is one of the major challenges currently investigated by the field. A large portion of established approaches aims to detect erroneous predictions by means of assigning confidence scores. This confidence may be obtained by either quantifying the model's predictive uncertainty, learning explicit scoring functions, or assessing whether the input is in line with the training distribution. Curiously, while these approaches all state to address the same eventual goal of detecting failures of a classifier upon real-world application, they currently constitute largely separated research fields with individual evaluation protocols, which either exclude a substantial part of relevant methods or ignore large parts of relevant failure sources. In this work, we systematically reveal current pitfalls caused by these inconsistencies and derive requirements for a holistic and realistic evaluation of failure detection. To demonstrate the relevance of this unified perspective, we present a large-scale empirical study for the first time enabling benchmarking confidence scoring functions w.r.t all relevant methods and failure sources. The revelation of a simple softmax response baseline as the overall best performing method underlines the drastic shortcomings of current evaluation in the plethora of publicized research on confidence scoring. Code …
[ MH1-2-3-4 ]
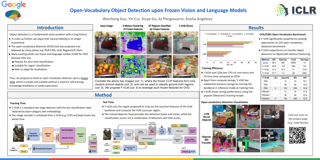
We present F-VLM, a simple open-vocabulary object detection method built uponFrozenVision andLanguageModels. F-VLM simplifies the current multi-stage training pipeline by eliminating the need for knowledge distillation or detection-tailored pretraining. Surprisingly, we observe that a frozen VLM: 1) retains the locality-sensitive features necessary for detection, and 2) is a strong region classifier. We finetune only the detector head and combine the detector and VLM outputs for each region at inference time. F-VLM shows compelling scaling behavior and achieves +6.5 mask AP improvement over the previous state of theart on novel categories of LVIS open-vocabulary detection benchmark. In addition, we demonstrate very competitive results on COCO open-vocabulary detection benchmark and cross-dataset transfer detection, in addition to significant training speed-up and compute savings. Code will be released.
[ MH1-2-3-4 ]
Oriented object detection emerges in many applications from aerial images to autonomous driving, while many existing detection benchmarks are annotated with horizontal bounding box only which is also less costive than fine-grained rotated box, leading to a gap between the readily available training corpus and the rising demand for oriented object detection. This paper proposes a simple yet effective oriented object detection approach called H2RBox merely using horizontal box annotation for weakly-supervised training, which closes the above gap and shows competitive performance even against those trained with rotated boxes. The cores of our method are weakly- and self-supervised learning, which predicts the angle of the object by learning the consistency of two different views. To our best knowledge, H2RBox is the first horizontal box annotation-based oriented object detector. Compared to an alternative i.e. horizontal box-supervised instance segmentation with our post adaption to oriented object detection, our approach is not susceptible to the prediction quality of mask and can perform more robustly in complex scenes containing a large number of dense objects and outliers. Experimental results show that H2RBox has significant performance and speed advantages over horizontal box-supervised instance segmentation methods, as well as lower memory requirements. While compared to rotated …
[ MH1-2-3-4 ]
Large language models show improved downstream task performance when prompted to generate step-by-step reasoning to justify their final answers. These reasoning steps greatly improve model interpretability and verification, but objectively studying their correctness (independent of the final answer) is difficult without reliable methods for automatic evaluation. We simply do not know how often the stated reasoning steps actually support the final end task predictions. In this work, we present ROSCOE, a suite of interpretable, unsupervised automatic scores that improve and extend previous text generation evaluation metrics. To evaluate ROSCOE against baseline metrics, we design a typology of reasoning errors and collect synthetic and human evaluation scores on commonly used reasoning datasets. In contrast with existing metrics, ROSCOE can measure semantic consistency, logicality, informativeness, fluency, and factuality — among other traits — by leveraging properties of step-by-step rationales. We empirically verify the strength of our metrics on five human annotated and six programmatically perturbed diagnostics datasets - covering a diverse set of tasks that require reasoning skills and show that ROSCOE can consistently outperform baseline metrics.
[ MH1-2-3-4 ]
We present the Group Propagation Vision Transformer (GPViT): a novel non- hierarchical (i.e. non-pyramidal) transformer model designed for general visual recognition with high-resolution features. High-resolution features (or tokens) are a natural fit for tasks that involve perceiving fine-grained details such as detection and segmentation, but exchanging global information between these features is expensive in memory and computation because of the way self-attention scales. We provide a highly efficient alternative Group Propagation Block (GP Block) to exchange global information. In each GP Block, features are first grouped to- gether by a fixed number of learnable group tokens; we then perform Group Propagation where global information is exchanged between the grouped fea- tures; finally, global information in the updated grouped features is returned back to the image features through a transformer decoder. We evaluate GPViT on a variety of visual recognition tasks including image classification, semantic seg- mentation, object detection, and instance segmentation. Our method achieves significant performance gains over previous works across all tasks, especially on tasks that require high-resolution outputs, for example, our GPViT-L3 out- performs Swin Transformer-B by 2.0 mIoU on ADE20K semantic segmentation with only half as many parameters. Code and pre-trained models are available at https://github.com/ChenhongyiYang/GPViT.
[ MH1-2-3-4 ]
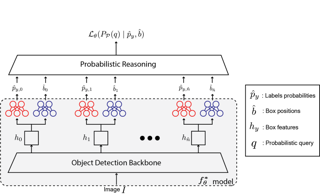
Training object detection models usually requires instance-level annotations, such as the positions and labels of all objects present in each image. Such supervision is unfortunately not always available and, more often, only image-level information is provided, also known as weak supervision. Recent works have addressed this limitation by leveraging knowledge from a richly annotated domain. However, the scope of weak supervision supported by these approaches has been very restrictive, preventing them to use all available information. In this work, we propose ProbKT, a framework based on probabilistic logical reasoning to train object detection models with arbitrary types of weak supervision. We empirically show on different datasets that using all available information is beneficial as our ProbKT leads to significant improvement on target domain and better generalisation compared to existing baselines. We also showcase the ability of our approach to handle complex logic statements as supervision signal.
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]
Simultaneous machine translation (SiMT) outputs the target sequence while receiving the source sequence, and hence learning when to start translating each target token is the core challenge for SiMT task. However, it is non-trivial to learn the optimal moment among many possible moments of starting translating, as the moments of starting translating always hide inside the model and can only be supervised with the observed target sequence. In this paper, we propose a Hidden Markov Transformer (HMT), which treats the moments of starting translating as hidden events and the target sequence as the corresponding observed events, thereby organizing them as a hidden Markov model. HMT explicitly models multiple moments of starting translating as the candidate hidden events, and then selects one to generate the target token. During training, by maximizing the marginal likelihood of the target sequence over multiple moments of starting translating, HMT learns to start translating at the moments that target tokens can be generated more accurately. Experiments on multiple SiMT benchmarks show that HMT outperforms strong baselines and achieves state-of-the-art performance.
[ MH1-2-3-4 ]

Open-domain dialogue systems aim to interact with humans through natural language texts in an open-ended fashion. Despite the recent success of super large dialogue systems such as ChatGPT, using medium-to-small-sized dialogue systems remains the common practice as they are more lightweight and accessible; however, generating diverse dialogue responses is challenging, especially with smaller models. In this work, we propose an Equal-size Hard Expectation--Maximization (EqHard-EM) algorithm to train a multi-decoder model for diverse dialogue generation. Our algorithm assigns a sample to a decoder in a hard manner and additionally imposes an equal-assignment constraint to ensure that all decoders are well-trained. We provide detailed theoretical analysis to justify our approach. Further, experiments on two large-scale open-domain dialogue datasets verify that our EqHard-EM algorithm generates high-quality diverse responses.
[ MH1-2-3-4 ]
Comprehensive studies of synthetic optical flow datasets have attempted to reveal what properties lead to accuracy improvement in learning-based optical flow estimation. However, manually identifying and verifying the properties that contribute to accurate optical flow estimation require large-scale trial-and-error experiments with iteratively generating whole synthetic datasets and training on them, \ie, impractical. To address this challenge, we propose a differentiable optical flow data generation pipeline and a loss function to drive the pipeline, called DFlow. DFlow efficiently synthesizes a dataset effective for a target domain without the need for cumbersome try-and-errors. This favorable property is achieved by proposing an efficient dataset comparison method that uses neural networks to approximately encode each dataset and compares the proxy networks instead of explicitly comparing datasets in a pairwise way. Our experiments show the competitive performance of our DFlow against the prior arts in pre-training. Furthermore, compared to competing datasets, DFlow achieves the best fine-tuning performance on the Sintel public benchmark with RAFT.
[ MH1-2-3-4 ]

Diffusion probabilistic models (DPMs) have become a popular approach to conditional generation, due to their promising results and support for cross-modal synthesis. A key desideratum in conditional synthesis is to achieve high correspondence between the conditioning input and generated output. Most existing methods learn such relationships implicitly, by incorporating the prior into the variational lower bound. In this work, we take a different route---we explicitly enhance input-output connections by maximizing their mutual information. To this end, we introduce a Conditional Discrete Contrastive Diffusion (CDCD) loss and design two contrastive diffusion mechanisms to effectively incorporate it into the denoising process, combining the diffusion training and contrastive learning for the first time by connecting it with the conventional variational objectives. We demonstrate the efficacy of our approach in evaluations with diverse multimodal conditional synthesis tasks: dance-to-music generation, text-to-image synthesis, as well as class-conditioned image synthesis. On each, we enhance the input-output correspondence and achieve higher or competitive general synthesis quality. Furthermore, the proposed approach improves the convergence of diffusion models, reducing the number of required diffusion steps by more than 35% on two benchmarks, significantly increasing the inference speed.
[ MH1-2-3-4 ]
In this paper, we leverage low-level compiler intermediate representations (IR) code translation. Traditional transpilers rely on syntactic information and handcrafted rules, which limits their applicability and produces unnatural-looking code. Applying neural machine translation (NMT) approaches to code has successfully broadened the set of programs on which one can get a natural-looking translation. However, they treat the code as sequences of text tokens, and still do not differentiate well enough between similar pieces of code which have different semantics in different languages. The consequence is low quality translation, reducing the practicality of NMT, and stressing the need for an approach significantly increasing its accuracy. Here we propose to augment code translation with IRs, specifically LLVM IR, with results on the C++, Java, Rust, and Go languages. Our method improves upon the state of the art for unsupervised code translation, increasing the number of correct translations by 11% on average, and up to 79% for the Java → Rust pair with greedy decoding. With beam search, it increases the number of correct translations by 5.5% in average. We extend previous test sets for code translation, by adding hundreds of Go and Rust functions. Additionally, we train models with high performance on the …
[ MH1-2-3-4 ]

High-resolution images are prevalent in various applications, such as autonomous driving and computer-aided diagnosis. However, training neural networks on such images is computationally challenging and easily leads to out-of-memory errors even on modern GPUs. We propose a simple method, Iterative Patch Selection (IPS), which decouples the memory usage from the input size and thus enables the processing of arbitrarily large images under tight hardware constraints. IPS achieves this by selecting only the most salient patches, which are then aggregated into a global representation for image recognition. For both patch selection and aggregation, a cross-attention based transformer is introduced, which exhibits a close connection to Multiple Instance Learning. Our method demonstrates strong performance and has wide applicability across different domains, training regimes and image sizes while using minimal accelerator memory. For example, we are able to finetune our model on whole-slide images consisting of up to 250k patches (>16 gigapixels) with only 5 GB of GPU VRAM at a batch size of 16.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Image steganography is the process of concealing secret information in images through imperceptible changes. Recent work has formulated this task as a classic constrained optimization problem. In this paper, we argue that image steganography is inherently performed on the (elusive) manifold of natural images, and propose an iterative neural network trained to perform the optimization steps. In contrast to classical optimization methods like L-BFGS or projected gradient descent, we train the neural network to also stay close to the manifold of natural images throughout the optimization. We show that our learned neural optimization is faster and more reliable than classical optimization approaches. In comparison to previous state-of-the-art encoder-decoder based steganography methods, it reduces the recovery error rate by multiple orders of magnitude and achieves zero error up to 3 bits per pixel (bpp) without the need for error-correcting codes.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Recent symbolic music generative models have achieved significant improvements in the quality of the generated samples. Nevertheless, it remains hard for users to control the output in such a way that it matches their expectation. To address this limitation, high-level, human-interpretable conditioning is essential. In this work, we release FIGARO, a Transformer-based conditional model trained to generate symbolic music based on a sequence of high-level control codes. To this end, we propose description-to-sequence learning, which consists of automatically extracting fine-grained, human-interpretable features (the description) and training a sequence-to-sequence model to reconstruct the original sequence given only the description as input. FIGARO achieves state-of-the-art performance in multi-track symbolic music generation both in terms of style transfer and sample quality. We show that performance can be further improved by combining human-interpretable with learned features. Our extensive experimental evaluation shows that FIGARO is able to generate samples that closely adhere to the content of the input descriptions, even when they deviate significantly from the training distribution.
[ MH1-2-3-4 ]

The recent advance of neural fields, such as neural radiance fields, has significantly pushed the boundary of scene representation learning. Aiming to boost the computation efficiency and rendering quality of 3D scenes, a popular line of research maps the 3D coordinate system to another measuring system, e.g., 2D manifolds and hash tables, for modeling neural fields. The conversion of coordinate systems can be typically dubbed as \emph{gauge transformation}, which is usually a pre-defined mapping function, e.g., orthogonal projection or spatial hash function. This begs a question: can we directly learn a desired gauge transformation along with the neural field in an end-to-end manner? In this work, we extend this problem to a general paradigm with a taxonomy of discrete and continuous cases, and develop an end-to-end learning framework to jointly optimize the gauge transformation and neural fields. To counter the problem that the learning of gauge transformations can collapse easily, we derive a general regularization mechanism from the principle of information conservation during the gauge transformation. To circumvent the high computation cost in gauge learning with regularization, we directly derive an information-invariant gauge transformation which allows to preserve scene information inherently and yield superior performance.
[ MH1-2-3-4 ]
Large pre-trained language models (PLMs) have demonstrated strong performance on natural language understanding (NLU) tasks through fine-tuning. However, fine-tuned models still suffer from overconfident predictions, especially in out-of-domain settings. In this paper, we tackle the problem of calibrating fine-tuned language models. We demonstrate that the PLMs are well-calibrated on the masked language modeling task with robust predictive confidence under domain shift, yet the fine-tuned models fail to retain such property due to catastrophic forgetting, which impacts the calibration on the downstream classification task. In light of these observations, we evaluate the calibration of several methods that preserve pre-trained features and show that preserving pre-trained features can improve the calibration of fine-tuned language models. Among these methods, our proposed method that encourages the fine-tuned model to learn generative representations with auxiliary language modeling objective achieves competitive accuracy and the lowest expected calibration error compared to several strong baselines under both in-domain and out-of-domain settings on three downstream NLU tasks.
[ MH1-2-3-4 ]
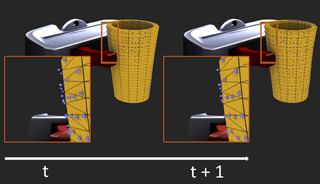
Physical simulations that accurately model reality are crucial for many engineering disciplines such as mechanical engineering and robotic motion planning. In recent years, learned Graph Network Simulators produced accurate mesh-based simulations while requiring only a fraction of the computational cost of traditional simulators. Yet, the resulting predictors are confined to learning from data generated by existing mesh-based simulators and thus cannot include real world sensory information such as point cloud data. As these predictors have to simulate complex physical systems from only an initial state, they exhibit a high error accumulation for long-term predictions. In this work, we integrate sensory information to ground Graph Network Simulators on real world observations. In particular, we predict the mesh state of deformable objects by utilizing point cloud data. The resulting model allows for accurate predictions over longer time horizons, even under uncertainties in the simulation, such as unknown material properties. Since point clouds are usually not available for every time step, especially in online settings, we employ an imputation-based model. The model can make use of such additional information only when provided, and resorts to a standard Graph Network Simulator, otherwise. We experimentally validate our approach on a suite of prediction tasks for …
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]
[ MH1-2-3-4 ]

Sequential data naturally have different lengths in many domains, with some very long sequences. As an important modeling tool, neural attention should capture long-range interaction in such sequences. However, most existing neural attention models admit only short sequences, or they have to employ chunking or padding to enforce a constant input length. Here we propose a simple neural network building block called ChordMixer which can model the attention for long sequences with variable lengths. Each ChordMixer block consists of a position-wise rotation layer without learnable parameters and an element-wise MLP layer. Repeatedly applying such blocks forms an effective network backbone that mixes the input signals towards the learning targets. We have tested ChordMixer on the synthetic adding problem, long document classification, and DNA sequence-based taxonomy classification. The experiment results show that our method substantially outperforms other neural attention models.
[ MH1-2-3-4 ]
Few-shot prompting is a surprisingly powerful way to use Large Language Models (LLMs) to solve various tasks. However, this approach struggles as the task complexity increases or when the individual reasoning steps of the task themselves are hard to learn, especially when embedded in more complex tasks. To address this, we propose Decomposed Prompting, a new approach to solve complex tasks by decomposing them (via prompting) into simpler sub-tasks that can be delegated to a library of prompting-based LLMs dedicated to these sub-tasks. This modular structure allows each prompt to be optimized for its specific sub-task, further decomposed if necessary, and even easily replaced with more effective prompts, trained models, or symbolic functions if desired.We show that the flexibility and modularity of Decomposed Prompting allows it to outperform prior work on few-shot prompting using GPT3. On symbolic reasoning tasks, we can further decompose sub-tasks that are hard for LLMs into even simpler solvable sub-tasks. When the complexity comes from the input length, we can recursively decompose the task into the same task but with smaller inputs. We also evaluate our approach on textual multi-step reasoning tasks: on long-context multi-hop QA task, we can more effectively teach the sub-tasks via our …
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]
Mixup, which creates synthetic training instances by linearly interpolating random sample pairs, is a simple and yet effective regularization technique to boost the performance of deep models trained with SGD. In this work, we report a previously unobserved phenomenon in Mixup raining: on a number of standard datasets, the performance of Mixup-trained models starts to decay after training for a large number of epochs, giving rise to a U-shaped generalization curve. This behavior is further aggravated when the size of original dataset is reduced. To help understand such a behavior of Mixup, we show theoretically that Mixup training may introduce undesired data-dependent label noises to the synthesized data. Via analyzing a least-square regression problem with a random feature model, we explain why noisy labels may cause the U-shaped curve to occur: Mixup improves generalization through fitting the clean patterns at the early training stage, but as training progresses, Mixup becomes over-fitting to the noise in the synthetic data. Extensive experiments are performed on a variety of benchmark datasets, validating this explanation.
[ MH1-2-3-4 ]

The robustness of a deep classifier can be characterized by its margins: the decision boundary's distances to natural data points. However, it is unclear whether existing robust training methods effectively increase the margin for each vulnerable point during training. To understand this, we propose a continuous-time framework for quantifying the relative speed of the decision boundary with respect to each individual point. Through visualizing the moving speed of the decision boundary under Adversarial Training, one of the most effective robust training algorithms, a surprising moving-behavior is revealed: the decision boundary moves away from some vulnerable points but simultaneously moves closer to others, decreasing their margins. To alleviate these conflicting dynamics of the decision boundary, we propose Dynamics-aware Robust Training (DyART), which encourages the decision boundary to engage in movement that prioritizes increasing smaller margins. In contrast to prior works, DyART directly operates on the margins rather than their indirect approximations, allowing for more targeted and effective robustness improvement. Experiments on the CIFAR-10 and Tiny-ImageNet datasets verify that DyART alleviates the conflicting dynamics of the decision boundary and obtains improved robustness under various perturbation sizes compared to the state-of-the-art defenses. Our code is available at https://github.com/Yuancheng-Xu/Dynamics-Aware-Robust-Training.
[ MH1-2-3-4 ]
The recent success of Vision Transformers is shaking the long dominance of Convolutional Neural Networks (CNNs) in image recognition for a decade. Specifically, in terms of robustness on out-of-distribution samples, recent research finds that Transformers are inherently more robust than CNNs, regardless of different training setups. Moreover, it is believed that such superiority of Transformers should largely be credited to their \emph{self-attention-like architectures per se}. In this paper, we question that belief by closely examining the design of Transformers. Our findings lead to three highly effective architecture designs for boosting robustness, yet simple enough to be implemented in several lines of code, namely a) patchifying input images, b) enlarging kernel size, and c) reducing activation layers and normalization layers. Bringing these components together, we are able to build pure CNN architectures without any attention-like operations that are as robust as, or even more robust than, Transformers. We hope this work can help the community better understand the design of robust neural architectures. The code is publicly available at https://github.com/UCSC-VLAA/RobustCNN.
[ MH1-2-3-4 ]
We propose a novel knowledge distillation (KD) method to selectively instill teacher knowledge into a student model motivated by situations where the student's capacity is significantly smaller than that of the teachers. In vanilla KD, the teacher primarily sets a predictive target for the student to follow, and we posit that this target is overly optimistic due to the student's lack of capacity. We develop a novel scaffolding scheme where the teacher, in addition to setting a predictive target, also scaffolds the student's prediction by censoring hard-to-learn examples. Scaffolding utilizes the same information as the teacher's soft-max predictions as inputs, and in this sense, our proposal can be viewed as a natural variant of vanilla KD. We show on synthetic examples that censoring hard-examples leads to smoothening the student's loss landscape so that the student encounters fewer local minima. As a result, it has good generalization properties. Against vanilla KD, we achieve improved performance and are comparable to more intrusive techniques that leverage feature matching on benchmark datasets.
[ MH1-2-3-4 ]
A well-known failure mode of neural networks is that they may confidently return erroneous predictions. Such unsafe behaviour is particularly frequent when the use case slightly differs from the training context, and/or in the presence of an adversary. This work presents a novel direction to address these issues in a broad, general manner: imposing class-aware constraints on a model's internal activation patterns. Specifically, we assign to each class a unique, fixed, randomly-generated binary vector - hereafter called class code - and train the model so that its cross-depths activation patterns predict the appropriate class code according to the input sample's class. The resulting predictors are dubbed total activation classifiers (TAC), and TACs may either be trained from scratch, or used with negligible cost as a thin add-on on top of a frozen, pre-trained neural network. The distance between a TAC's activation pattern and the closest valid code acts as an additional confidence score, besides the default unTAC'ed prediction head's. In the add-on case, the original neural network's inference head is completely unaffected (so its accuracy remains the same) but we now have the option to use TAC's own confidence and prediction when determining which course of action to take in …
[ MH1-2-3-4 ]
Achieving structured, data-free sparsity of deep neural networks (DNNs) remains an open area of research. In this work, we address the challenge of pruning filters without access to the original training set or loss function. We propose the discriminative filters hypothesis, that well-trained models possess discriminative filters, and any non-discriminative filters can be pruned without impacting the predictive performance of the classifier. Based on this hypothesis, we propose a new paradigm for pruning neural networks: distributional pruning, wherein we only require access to the distributions that generated the original datasets. Our approach to solving the problem of formalising and quantifying the discriminating ability of filters is through the total variation (TV) distance between the class-conditional distributions of the filter outputs. We present empirical results that, using this definition of discriminability, support our hypothesis on a variety of datasets and architectures. Next, we define the LDIFF score, a heuristic to quantify the extent to which a layer possesses a mixture of discriminative and non-discriminative filters. We empirically demonstrate that the LDIFF score is indicative of the performance of random pruning for a given layer, and thereby indicates the extent to which a layer may be pruned. Our main contribution is a …
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
One-shot non-autoregressive neural networks, different from RL-based ones, have been actively adopted for solving combinatorial optimization (CO) problems, which can be trained by the objective score in a self-supervised manner. Such methods have shown their superiority in efficiency (e.g. by parallelization) and potential for tackling predictive CO problems for decision-making under uncertainty. While the discrete constraints often become a bottleneck for gradient-based neural solvers, as currently handled in three typical ways: 1) adding a soft penalty in the objective, where a bounded violation of the constraints cannot be guaranteed, being critical to many constraint-sensitive scenarios; 2) perturbing the input to generate an approximate gradient in a black-box manner, though the constraints are exactly obeyed while the approximate gradients can hurt the performance on the objective score; 3) a compromise by developing soft algorithms whereby the output of neural networks obeys a relaxed constraint, and there can still occur an arbitrary degree of constraint-violation. Towards the ultimate goal of establishing a general framework for neural CO solver with the ability to control an arbitrary-small degree of constraint violation, in this paper, we focus on a more achievable and common setting: the cardinality constraints, which in fact can be readily encoded by …
[ MH1-2-3-4 ]

Decoupling representation learning and classifier learning has been shown to be effective in classification with long-tailed data. There are two main ingredients in constructing a decoupled learning scheme; 1) how to train the feature extractor for representation learning so that it provides generalizable representations and 2) how to re-train the classifier that constructs proper decision boundaries by handling class imbalances in long-tailed data. In this work, we first apply Stochastic Weight Averaging (SWA), an optimization technique for improving the generalization of deep neural networks, to obtain better generalizing feature extractors for long-tailed classification. We then propose a novel classifier re-training algorithm based on stochastic representation obtained from the SWA-Gaussian, a Gaussian perturbed SWA, and a self-distillation strategy that can harness the diverse stochastic representations based on uncertainty estimates to build more robust classifiers. Extensive experiments on CIFAR10/100-LT, ImageNet-LT, and iNaturalist-2018 benchmarks show that our proposed method improves upon previous methods both in terms of prediction accuracy and uncertainty estimation.
[ MH1-2-3-4 ]
In this paper we empirically investigate the conjecture from Entezari et al. (2021) which states that if permutation invariance is taken into account, then there should be no loss barrier to the linear interpolation between SGD solutions. We conduct our investigation using standard computer vision architectures trained on CIFAR-10 and ImageNet. First, we observe a general phenomenon in which interpolated deep networks suffer a collapse in the variance of their activations. We demonstrate that an appropriate rescaling of the pre-activations of the interpolated networks ameliorates this problem and significantly reduces the barrier. Second, by combining this with an algorithm for finding permutations based on maximizing correlations between the activations of matched neurons, we are able to reduce the interpolation barrier for a standard ResNet18 trained on CIFAR-10 to 1.5% absolute test error. We explore the interaction between our method and the choice of normalization layer, and demonstrate its robustness across a variety of architectures and training sets.
[ MH1-2-3-4 ]
Deep Neural Networks are known to be brittle to even minor distribution shifts compared to the training distribution. While one line of work has demonstrated that \emph{Simplicity Bias} (SB) of DNNs -- bias towards learning only the simplest features -- is a key reason for this brittleness, another recent line of work has surprisingly found that diverse/ complex features are indeed learned by the backbone, and their brittleness is due to the linear classification head relying primarily on the simplest features. To bridge the gap between these two lines of work, we first hypothesize and verify that while SB may not altogether preclude learning complex features, it amplifies simpler features over complex ones. Namely, simple features are replicated several times in the learned representations while complex features might not be replicated. This phenomenon, we term \emph{Feature Replication Hypothesis}, coupled with the \emph{Implicit Bias} of SGD to converge to maximum margin solutions in the feature space, leads the models to rely mostly on the simple features for classification. To mitigate this bias, we propose \emph{Feature Reconstruction Regularizer (FRR)} to ensure that the learned features can be reconstructed back from the logits. The use of \emph{FRR} in linear layer training (\emph{FRR-L}) encourages …
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Motivated by various practical applications, we propose a novel and general formulation of targeted multi-objective hyperparameter optimization. Our formulation allows a clear specification of an automatable optimization goal using lexicographic preference over multiple objectives. We then propose a randomized directed search method named LexiFlow to solve this problem. We demonstrate the strong empirical performance of the proposed algorithm in multiple hyperparameter optimization tasks.
[ MH1-2-3-4 ]
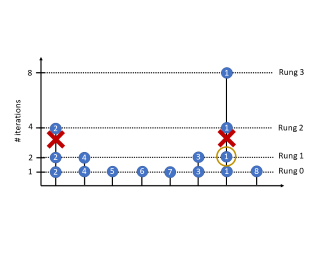
Hyperparameter optimization (HPO) and neural architecture search (NAS) are methods of choice to obtain the best-in-class machine learning models, but in practice they can be costly to run. When models are trained on large datasets, tuning them with HPO or NAS rapidly becomes prohibitively expensive for practitioners, even when efficient multi-fidelity methods are employed. We propose an approach to tackle the challenge of tuning machine learning models trained on large datasets with limited computational resources. Our approach, named PASHA, extends ASHA and is able to dynamically allocate maximum resources for the tuning procedure depending on the need. The experimental comparison shows that PASHA identifies well-performing hyperparameter configurations and architectures while consuming significantly fewer computational resources than ASHA.
[ MH1-2-3-4 ]

Temporal networks model a variety of important phenomena involving timed interactions between entities. Existing methods for machine learning on temporal networks generally exhibit at least one of two limitations. First, many methods assume time to be discretized, so if the time data is continuous, the user must determine the discretization and discard precise time information. Second, edge representations can only be calculated indirectly from the nodes, which may be suboptimal for tasks like edge classification. We present a simple method that avoids both shortcomings: construct the line graph of the network, which includes a node for each interaction, and weigh the edges of this graph based on the difference in time between interactions. From this derived graph, edge representations for the original network can be computed with efficient classical methods. The simplicity of this approach facilitates explicit theoretical analysis: we can constructively show the effectiveness of our method's representations for a natural synthetic model of temporal networks. Empirical results on real-world networks demonstrate our method's efficacy and efficiency on both link classification and prediction.
[ MH1-2-3-4 ]
Modern machine learning research relies on relatively few carefully curated datasets. Even in these datasets, and typically in `untidy' or raw data, practitioners are faced with significant issues of data quality and diversity which can be prohibitively labor intensive to address. Existing methods for dealing with these challenges tend to make strong assumptions about the particular issues at play, and often require a priori knowledge or metadata such as domain labels. Our work is orthogonal to these methods: we instead focus on providing a unified and efficient framework for Metadata Archaeology -- uncovering and inferring metadata of examples in a dataset. We curate different subsets of data that might exist in a dataset (e.g. mislabeled, atypical, or out-of-distribution examples) using simple transformations, and leverage differences in learning dynamics between these probe suites to infer metadata of interest. Our method is on par with far more sophisticated mitigation methods across different tasks: identifying and correcting mislabeled examples, classifying minority-group samples, prioritizing points relevant for training and enabling scalable human auditing of relevant examples.
[ MH1-2-3-4 ]
The integration of hard constraints on neural network outputs is a very desirable capability. This allows to instill trust in AI by guaranteeing the sanity of that neural network predictions with respect to domain knowledge. Recently, this topic has received a lot of attention. However, all the existing methods usually either impose the constraints in a "weak" form at training time, with no guarantees at inference, or fail to provide a general framework that supports different tasks and constraint types. We tackle this open problem from a neuro-symbolic perspective. Our pipeline enhances a conventional neural predictor with (1) a symbolic reasoning module capable of correcting structured prediction errors and (2) a neural attention module that learns to direct the reasoning effort to focus on potential prediction errors, while keeping other outputs unchanged. This framework provides an appealing trade-off between the efficiency of constraint-free neural inference and the prohibitive cost of exhaustive reasoning at inference time. We show that our method outperforms the state of the art on visual-Sudoku, and can also benefit visual scene graph prediction. Furthermore, it can improve the performance of existing neuro-symbolic systems that lack our explicit reasoning during inference.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Feature engineering is widely acknowledged to be pivotal in tabular data analysis and prediction. Automated feature engineering (AutoFE) emerged to automate this process managed by experienced data scientists and engineers conventionally. In this area, most — if not all — prior work adopted an identical framework from the neural architecture search (NAS) method. While feasible, we posit that the NAS framework very much contradicts the way how human experts cope with the data since the inherent Markov decision process (MDP) setup differs. We point out that its data-unobserved setup consequentially results in an incapability to generalize across different datasets as well as also high computational cost. This paper proposes a novel AutoFE framework Feature Set Data-Driven Search (FETCH), a pipeline mainly for feature generation and selection. Notably, FETCH is built on a brand-new data-driven MDP setup using the tabular dataset as the state fed into the policy network. Further, we posit that the crucial merit of FETCH is its transferability where the yielded policy network trained on a variety of datasets is indeed capable to enact feature engineering on unseen data, without requiring additional exploration. To the best of our knowledge, this is a pioneer attempt to build a tabular …
[ MH1-2-3-4 ]
We present a novel neural-networks-based algorithm to compute optimal transport maps and plans for strong and weak transport costs. To justify the usage of neural networks, we prove that they are universal approximators of transport plans between probability distributions. We evaluate the performance of our optimal transport algorithm on toy examples and on the unpaired image-to-image translation.
[ MH1-2-3-4 ]
Recent breakthroughs in text-to-image synthesis have been driven by diffusion models trained on billions of image-text pairs. Adapting this approach to 3D synthesis would require large-scale datasets of labeled 3D or multiview data and efficient architectures for denoising 3D data, neither of which currently exist. In this work, we circumvent these limitations by using a pretrained 2D text-to-image diffusion model to perform text-to-3D synthesis. We introduce a loss based on probability density distillation that enables the use of a 2D diffusion model as a prior for optimization of a parametric image generator. Using this loss in a DeepDream-like procedure, we optimize a randomly-initialized 3D model (a Neural Radiance Field, or NeRF) via gradient descent such that its 2D renderings from random angles achieve a low loss. The resulting 3D model of the given text can be viewed from any angle, relit by arbitrary illumination, or composited into any 3D environment. Our approach requires no 3D training data and no modifications to the image diffusion model, demonstrating the effectiveness of pretrained image diffusion models as priors.
[ MH1-2-3-4 ]
Diffusion models achieve outstanding generative performance in various domains. Despite their great success, they lack semantic latent space which is essential for controlling the generative process. To address the problem, we propose asymmetric reverse process (Asyrp) which discovers the semantic latent space in frozen pretrained diffusion models. Our semantic latent space, named h-space, has nice properties for accommodating semantic image manipulation: homogeneity, linearity, robustness, and consistency across timesteps. In addition, we measure editing strength and quality deficiency of a generative process at timesteps to provide a principled design of the process for versatility and quality improvements. Our method is applicable to various architectures (DDPM++, iDDPM, and ADM) and datasets (CelebA-HQ, AFHQ-dog, LSUN-church, LSUN-bedroom, and METFACES).
[ MH1-2-3-4 ]
Diffusion models have been recently studied as powerful generative inverse problem solvers, owing to their high quality reconstructions and the ease of combining existing iterative solvers. However, most works focus on solving simple linear inverse problems in noiseless settings, which significantly under-represents the complexity of real-world problems. In this work, we extend diffusion solvers to efficiently handle general noisy (non)linear inverse problems via the Laplace approximation of the posterior sampling. Interestingly, the resulting posterior sampling scheme is a blended version of diffusion sampling with the manifold constrained gradient without a strict measurement consistency projection step, yielding a more desirable generative path in noisy settings compared to the previous studies. Our method demonstrates that diffusion models can incorporate various measurement noise statistics such as Gaussian and Poisson, and also efficiently handle noisy nonlinear inverse problems such as Fourier phase retrieval and non-uniform deblurring.
[ MH1-2-3-4 ]
While diffusion models have shown great success in image generation, their noise-inverting generative process does not explicitly consider the structure of images, such as their inherent multi-scale nature. Inspired by diffusion models and the empirical success of coarse-to-fine modelling, we propose a new diffusion-like model that generates images through stochastically reversing the heat equation, a PDE that locally erases fine-scale information when run over the 2D plane of the image. We interpret the solution of the forward heat equation with constant additive noise as a variational approximation in the diffusion latent variable model. Our new model shows emergent qualitative properties not seen in standard diffusion models, such as disentanglement of overall colour and shape in images. Spectral analysis on natural images highlights connections to diffusion models and reveals an implicit coarse-to-fine inductive bias in them.
[ MH1-2-3-4 ]
We introduce Discrete Predictor-Corrector diffusion models (DPC), extending predictor-corrector samplers in Gaussian diffusion models to the discrete case. Predictor-corrector samplers are a class of samplers for diffusion models, which improve on ancestral samplers by correcting the sampling distribution of intermediate diffusion states using MCMC methods. In DPC, the Langevin corrector, which does not have a direct counterpart in discrete space, is replaced with a discrete MCMC transition defined by a learned corrector kernel. The corrector kernel is trained to make the correction steps achieve asymptotic convergence, in distribution, to the correct marginal of the intermediate diffusion states. Equipped with DPC, we revisit recent transformer-based non-autoregressive generative models through the lens of discrete diffusion, and find that DPC can alleviate the compounding decoding error due to the parallel sampling of visual tokens. Our experiments show that DPC improves upon existing discrete latent space models for class-conditional image generation on ImageNet, and outperforms continuous diffusion models and GANs, according to standard metrics and user preference studies.
[ MH1-2-3-4 ]
Recently pre-trained language models (PLMs) have prospered in various natural language generation (NLG) tasks due to their ability to generate fairly fluent text. Nevertheless, these models are observed to capture and reproduce harmful contents in training corpora, typically toxic language and social biases, raising severe moral issues. Prior works on ethical NLG tackle detoxifying and debiasing separately, which is problematic since we find debiased models still exhibit toxicity while detoxified ones even exacerbate biases. To address such a challenge, we propose the first unified framework of detoxifying and debiasing called UDDIA, which jointly formalizes these two problems as rectifying the output space. We theoretically interpret our framework as learning a text distribution mixing weighted attributes. Besides, UDDIA conducts adaptive optimization of only a few parameters during decoding based on a parameter-efficient tuning schema without any training data. This leads to minimal generation quality loss and improved rectification performance with acceptable computational cost. Experimental results demonstrate that compared to several strong baselines, UDDIA achieves debiasing and detoxifying simultaneously and better balances efficiency and effectiveness, taking a further step towards practical ethical NLG.
[ MH1-2-3-4 ]
Variational autoencoders (VAEs) are powerful generative modelling methods, however they suffer from blurry generated samples and reconstructions compared to the images they have been trained on. Significant research effort has been spent to increase the generative capabilities by creating more flexible models but often flexibility comes at the cost of higher complexity and computational cost. Several works have focused on altering the reconstruction term of the evidence lower bound (ELBO), however, often at the expense of losing the mathematical link to maximizing the likelihood of the samples under the modeled distribution. Here we propose a new formulation of the reconstruction term for the VAE that specifically penalizes the generation of blurry images while at the same time still maximizing the ELBO under the modeled distribution. We show the potential of the proposed loss on three different data sets, where it outperforms several recently proposed reconstruction losses for VAEs.
[ MH1-2-3-4 ]
Modern applications increasingly require learning and forecasting latent dynamics from high-dimensional time-series. Compared to univariate time-series forecasting, this adds a new challenge of reasoning about the latent dynamics of an unobserved abstract state. Sequential latent variable models (LVMs) present an attractive solution, although existing works either struggle with long-term forecasting or have difficulty learning across diverse dynamics. In this paper, we first present a conceptual framework of sequential LVMs to unify existing works, contrast their fundamental limitations, and identify an intuitive solution to long-term forecasting for diverse dynamics via meta-learning. We then present the first framework of few-shot forecasting for high-dimensional time-series: instead of learning a single dynamic function, we leverage data of diverse dynamics and learn to adapt latent dynamic functions to few-shot support series. This is realized via Bayesian meta-learning underpinned by: 1) a latent dynamic function conditioned on knowledge derived from few-shot support series, and 2) a meta-model that learns to extract such dynamic-specific knowledge via feed-forward embedding of support set. We compared the presented framework with a comprehensive set of baseline models trained 1) globally on the large meta-training set with diverse dynamics, and 2) individually on single dynamics, both with and without fine-tuning to k-shot …
[ MH1-2-3-4 ]
Recent large-scale text-driven synthesis diffusion models have attracted much attention thanks to their remarkable capabilities of generating highly diverse images that follow given text prompts. Therefore, it is only natural to build upon these synthesis models to provide text-driven image editing capabilities. However, Editing is challenging for these generative models, since an innate property of an editing technique is to preserve some content from the original image, while in the text-based models, even a small modification of the text prompt often leads to a completely different outcome. State-of-the-art methods mitigate this by requiring the users to provide a spatial mask to localize the edit, hence, ignoring the original structure and content within the masked region. In this paper, we pursue an intuitive prompt-to-prompt editing framework, where the edits are controlled by text only. We analyze a text-conditioned model in depth and observe that the cross-attention layers are the key to controlling the relation between the spatial layout of the image to each word in the prompt. With this observation, we propose to control the attention maps along the diffusion process. Our approach enables us to monitor the synthesis process by editing the textual prompt only, paving the way to a …
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]

We propose the Factorized Fourier Neural Operator (F-FNO), a learning-based approach for simulating partial differential equations (PDEs). Starting from a recently proposed Fourier representation of flow fields, the F-FNO bridges the performance gap between pure machine learning approaches to that of the best numerical or hybrid solvers. This is achieved with new representations – separable spectral layers and improved residual connections – and a combination of training strategies such as the Markov assumption, Gaussian noise, and cosine learning rate decay. On several challenging benchmark PDEs on regular grids, structured meshes, and point clouds, the F-FNO can scale to deeper networks and outperform both the FNO and the geo-FNO, reducing the error by 83% on the Navier-Stokes problem, 31% on the elasticity problem, 57% on the airfoil flow problem, and 60% on the plastic forging problem. Compared to the state-of-the-art pseudo-spectral method, the F-FNO can take a step size that is an order of magnitude larger in time and achieve an order of magnitude speedup to produce the same solution quality.
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]
Graph-structured physical mechanisms are ubiquitous in real-world scenarios, thus revealing underneath formulas is of great importance for scientific discovery. However, classical symbolic regression methods fail on this task since they can only handle input-output pairs that are not graph-structured. In this paper, we propose a new approach that generalizes symbolic regression to graph-structured physical mechanisms. The essence of our method is to model the formula skeleton with a message-passing flow, which helps transform the discovery of the skeleton into the search for the message-passing flow. Such a transformation guarantees that we are able to search a message-passing flow, which is efficient and Pareto-optimal in terms of both accuracy and simplicity. Subsequently, the underneath formulas can be identified by interpreting component functions of the searched message-passing flow, reusing classical symbolic regression methods. We conduct extensive experiments on datasets from different physical domains, including mechanics, electricity, and thermology, and on real-world datasets of pedestrian dynamics without ground-truth formulas. The experimental results not only verify the rationale of our design but also demonstrate that the proposed method can automatically learn precise and interpretable formulas for graph-structured physical mechanisms.
[ MH1-2-3-4 ]

Physics-informed neural networks (PINNs) are attracting significant attention for solving partial differential equation (PDE) based inverse problems, including electrical impedance tomography (EIT). EIT is non-linear and especially its inverse problem is highly ill-posed. Therefore, successful training of PINN is extremely sensitive to interplay between different loss terms and hyper-parameters, including the learning rate. In this work, we propose a Bayesian approach through data-driven energy-based model (EBM) as a prior, to improve the overall accuracy and quality of tomographic reconstruction. In particular, the EBM is trained over the possible solutions of the PDEs with different boundary conditions. By imparting such prior onto physics-based training, PINN convergence is expedited by more than ten times faster to the PDE’s solution. Evaluation outcome shows that our proposed method is more robust for solving the EIT problem. Our code is available at: https://rooshenasgroup.github.io/eit_ebprior.
[ MH1-2-3-4 ]

Construction of a scaffold structure that supports a desired motif, conferring protein function, shows promise for the design of vaccines and enzymes. But a general solution to this motif-scaffolding problem remains open. Current machine-learning techniques for scaffold design are either limited to unrealistically small scaffolds (up to length 20) or struggle to produce multiple diverse scaffolds. We propose to learn a distribution over diverse and longer protein backbone structures via an E(3)-equivariant graph neural network. We develop SMCDiff to efficiently sample scaffolds from this distribution conditioned on a given motif; our algorithm is the first to theoretically guarantee conditional samples from a diffusion model in the large-compute limit. We evaluate our designed backbones by how well they align with AlphaFold2-predicted structures. We show that our method can (1) sample scaffolds up to 80 residues and (2) achieve structurally diverse scaffolds for a fixed motif.
[ MH1-2-3-4 ]

Learning effective protein representations is critical in a variety of tasks in biology such as predicting protein function or structure. Existing approaches usually pretrain protein language models on a large number of unlabeled amino acid sequences and then finetune the models with some labeled data in downstream tasks. Despite the effectiveness of sequence-based approaches, the power of pretraining on known protein structures, which are available in smaller numbers only, has not been explored for protein property prediction, though protein structures are known to be determinants of protein function. In this paper, we propose to pretrain protein representations according to their 3D structures. We first present a simple yet effective encoder to learn the geometric features of a protein. We pretrain the protein graph encoder by leveraging multiview contrastive learning and different self-prediction tasks. Experimental results on both function prediction and fold classification tasks show that our proposed pretraining methods outperform or are on par with the state-of-the-art sequence-based methods, while using much less pretraining data. Our implementation is available at https://github.com/DeepGraphLearning/GearNet.
[ MH1-2-3-4 ]

Molecular representation learning (MRL) has gained tremendous attention due to its critical role in learning from limited supervised data for applications like drug design. In most MRL methods, molecules are treated as 1D sequential tokens or 2D topology graphs, limiting their ability to incorporate 3D information for downstream tasks and, in particular, making it almost impossible for 3D geometry prediction/generation. In this paper, we propose a universal 3D MRL framework, called Uni-Mol, that significantly enlarges the representation ability and application scope of MRL schemes. Uni-Mol contains two pretrained models with the same SE(3) Transformer architecture: a molecular model pretrained by 209M molecular conformations; a pocket model pretrained by 3M candidate protein pocket data. Besides, Uni-Mol contains several finetuning strategies to apply the pretrained models to various downstream tasks. By properly incorporating 3D information, Uni-Mol outperforms SOTA in 14/15 molecular property prediction tasks. Moreover, Uni-Mol achieves superior performance in 3D spatial tasks, including protein-ligand binding pose prediction, molecular conformation generation, etc. The code, model, and data are made publicly available at https://github.com/dptech-corp/Uni-Mol.
[ MH1-2-3-4 ]

Unlike current state-of-the-art language models, young children actively acquire language through interactions with their surrounding environment and caretakers. One mechanism that has been argued to be critical to language learning is the ability to infer the mental states of other agents in social environments, coined Theory of Mind (ToM) by Premack & Woodruff (1978). Drawing inspiration from the modern operationalized versions of ToM implemented in Rabinowitz et al. (2018) and Zhu et al. (2021), we build language-learning agents equipped with ToM, and measure its effects on the learning process. We model ToM by giving the speaker agent an internal listener model that is trained alongside the speaker and used to rerank potential utterances. We experiment with varying task difficulty, hypothesizing that models will acquire more complex language to adapt to stronger environmental pressures. We find that training speakers with a highly weighted ToM listener component leads to performance gains in our image referential game setting. We also find some evidence that increasing task difficulty in the training process results in more fluent and precise utterances in evaluation. This suggests the potential utility of further incorporating ToM, as well as other insights from child language acquisition, into computational models of language …
[ MH1-2-3-4 ]

Humans have been shown to use a ''straightened'' encoding to represent the natural visual world as it evolves in time (Henaff et al. 2019). In the context of discrete video sequences, ''straightened'' means that changes between frames follow a more linear path in representation space at progressively deeper levels of processing. While deep convolutional networks are often proposed as models of human visual processing, many do not straighten natural videos. In this paper, we explore the relationship between network architecture, differing types of robustness, biologically-inspired filtering mechanisms, and representational straightness in response to time-varying input; we identify strengths and limitations of straightness as a useful way of evaluating neural network representations. We find that (1) adversarial training leads to straighter representations in both CNN and transformer-based architectures but (2) this effect is task-dependent, not generalizing to tasks such as segmentation and frame-prediction, where straight representations are not favorable for predictions; and nor to other types of robustness. In addition, (3) straighter representations impart temporal stability to class predictions, even for out-of-distribution data. Finally, (4) biologically-inspired elements increase straightness in the early stages of a network, but do not guarantee increased straightness in downstream layers of CNNs. We show that straightness …
[ MH1-2-3-4 ]
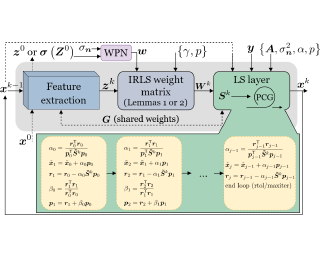
[ MH1-2-3-4 ]

Causal discovery from time-series data has been a central task in machine learning. Recently, Granger causality inference is gaining momentum due to its good explainability and high compatibility with emerging deep neural networks. However, most existing methods assume structured input data and degenerate greatly when encountering data with randomly missing entries or non-uniform sampling frequencies, which hampers their applications in real scenarios. To address this issue, here we present CUTS, a neural Granger causal discovery algorithm to jointly impute unobserved data points and build causal graphs, via plugging in two mutually boosting modules in an iterative framework: (i) Latent data prediction stage: designs a Delayed Supervision Graph Neural Network (DSGNN) to hallucinate and register unstructured data which might be of high dimension and with complex distribution; (ii) Causal graph fitting stage: builds a causal adjacency matrix with imputed data under sparse penalty. Experiments show that CUTS effectively infers causal graphs from irregular time-series data, with significantly superior performance to existing methods. Our approach constitutes a promising step towards applying causal discovery to real applications with non-ideal observations.
[ MH1-2-3-4 ]

[ MH1-2-3-4 ]
Bayesian meta-learning (BML) enables fitting expressive generative models to small datasets by incorporating inductive priors learned from a set of related tasks. The Neural Process (NP) is a prominent deep neural network-based BML architecture, which has shown remarkable results in recent years. In its standard formulation, the NP encodes epistemic uncertainty in an amortized, factorized, Gaussian variational (VI) approximation to the BML task posterior (TP), using reparametrized gradients. Prior work studies a range of architectural modifications to boost performance, such as attentive computation paths or improved context aggregation schemes, while the influence of the VI scheme remains under-explored. We aim to bridge this gap by introducing GMM-NP, a novel BML model, which builds on recent work that enables highly accurate, full-covariance Gaussian mixture (GMM) TP approximations by combining VI with natural gradients and trust regions. We show that GMM-NP yields tighter evidence lower bounds, which increases the efficiency of marginal likelihood optimization, leading to improved epistemic uncertainty estimation and accuracy. GMM-NP does not require complex architectural modifications, resulting in a powerful, yet conceptually simple BML model, which outperforms the state of the art on a range of challenging experiments, highlighting its applicability to settings where data is scarce.
[ MH1-2-3-4 ]
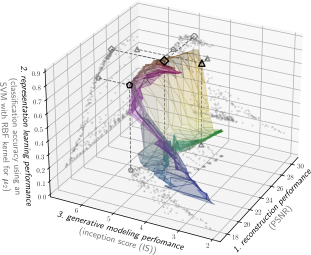
[ MH1-2-3-4 ]
Evaluating hypothetical statements about how the world would be had a different course of action been taken is arguably one key capability expected from modern AI systems. Counterfactual reasoning underpins discussions in fairness, the determination of blame and responsibility, credit assignment, and regret. In this paper, we study the evaluation of counterfactual statements through neural models. Specifically, we tackle two causal problems required to make such evaluations, i.e., counterfactual identification and estimation from an arbitrary combination of observational and experimental data. First, we show that neural causal models (NCMs) are expressive enough and encode the structural constraints necessary for performing counterfactual reasoning. Second, we develop an algorithm for simultaneously identifying and estimating counterfactual distributions. We show that this algorithm is sound and complete for deciding counterfactual identification in general settings. Third, considering the practical implications of these results, we introduce a new strategy for modeling NCMs using generative adversarial networks. Simulations corroborate with the proposed methodology.
[ MH1-2-3-4 ]
Latent confounding has been a long-standing obstacle for causal reasoning from observational data. One popular approach is to model the data using acyclic directed mixed graphs (ADMGs), which describe ancestral relations between variables using directed and bidirected edges. However, existing methods using ADMGs are based on either linear functional assumptions or a discrete search that is complicated to use and lacks computational tractability for large datasets. In this work, we further extend the existing body of work and develop a novel gradient-based approach to learning an ADMG with nonlinear functional relations from observational data. We first show that the presence of latent confounding is identifiable under the assumptions of bow-free ADMGs with nonlinear additive noise models. With this insight, we propose a novel neural causal model based on autoregressive flows. This not only enables us to model complex causal relationships behind the data, but also estimate their functional relationships (hence treatment effects) simultaneously. We further validate our approach via experiments on both synthetic and real-world datasets, and demonstrate the competitive performance against relevant baselines.
[ MH1-2-3-4 ]
Differentiable planning promises end-to-end differentiability and adaptivity. However, an issue prevents it from scaling up to larger-scale problems: they need to differentiate through forward iteration layers to compute gradients, which couples forward computation and backpropagation and needs to balance forward planner performance and computational cost of the backward pass. To alleviate this issue, we propose to differentiate through the Bellman fixed-point equation to decouple forward and backward passes for Value Iteration Network and its variants, which enables constant backward cost (in planning horizon) and flexible forward budget and helps scale up to large tasks. We study the convergence stability, scalability, and efficiency of the proposed implicit version of VIN and its variants and demonstrate their superiorities on a range of planning tasks: 2D navigation, visual navigation, and 2-DOF manipulation in configuration space and workspace.
[ MH1-2-3-4 ]

Many recent breakthroughs of deep reinforcement learning (RL) are mainly built upon large-scale distributed training of model-free methods using millions to billions of samples. On the other hand, state-of-the-art model-based RL methods can achieve human-level sample efficiency but often take a much longer over all training time than model-free methods. However, high sample efficiency and fast training time are both important to many real-world applications. We develop SpeedyZero, a distributed RL system built upon a state-of-the-art model-based RL method, EfficientZero, with a dedicated system design for fast distributed computation. We also develop two novel algorithmic techniques, Priority Refresh and Clipped LARS, to stabilize training with massive parallelization and large batch size. SpeedyZero maintains on-par sample efficiency compared with EfficientZero while achieving a 14.5X speedup in wall-clock time, leading to human-level performances on the Atari benchmark within 35 minutes using only 300k samples. In addition, we also present an in-depth analysis on the fundamental challenges in further scaling our system to bring insights to the community.
[ MH1-2-3-4 ]
Model-based reinforcement learning is one approach to increase sample efficiency. However, the accuracy of the dynamics model and the resulting compounding error over modelled trajectories are commonly regarded as key limitations. A natural question to ask is: How much more sample efficiency can be gained by improving the learned dynamics models? Our paper empirically answers this question for the class of model-based value expansion methods in continuous control problems. Value expansion methods should benefit from increased model accuracy by enabling longer rollout horizons and better value function approximations. Our empirical study, which leverages oracle dynamics models to avoid compounding model errors, shows that (1) longer horizons increase sample efficiency, but the gain in improvement decreases with each additional expansion step, and (2) the increased model accuracy only marginally increases the sample efficiency compared to learned models with identical horizons. Therefore, longer horizons and increased model accuracy yield diminishing returns in terms of sample efficiency. These improvements in sample efficiency are particularly disappointing when compared to model-free value expansion methods. Even though they introduce no computational overhead, we find their performance to be on-par with model-based value expansion methods. Therefore, we conclude that the limitation of model-based value expansion methods is …
[ MH1-2-3-4 ]
With the advent of large datasets, offline reinforcement learning is a promising framework for learning good decision-making policies without the need to interact with the real environment.However, offline RL requires the dataset to be reward-annotated, which presents practical challenges when reward engineering is difficult or when obtaining reward annotations is labor-intensive.In this paper, we introduce Optimal Transport Relabeling (OTR), an imitation learning algorithm that can automatically relabel offline data of mixed and unknown quality with rewards from a few good demonstrations. OTR's key idea is to use optimal transport to compute an optimal alignment between an unlabeled trajectory in the dataset and an expert demonstration to obtain a similarity measure that can be interpreted as a reward, which can then be used by an offline RL algorithm to learn the policy. OTR is easy to implement and computationally efficient. On D4RL benchmarks, we demonstrate that OTR with a single demonstration can consistently match the performance of offline RL with ground-truth rewards.
[ MH1-2-3-4 ]

Reinforcement Learning (RL) algorithms can solve challenging control problems directly from image observations, but they often require millions of environment interactions to do so. Recently, model-based RL algorithms have greatly improved sample-efficiency by concurrently learning an internal model of the world, and supplementing real environment interactions with imagined rollouts for policy improvement. However, learning an effective model of the world from scratch is challenging, and in stark contrast to humans that rely heavily on world understanding and visual cues for learning new skills. In this work, we investigate whether internal models learned by modern model-based RL algorithms can be leveraged to solve new, distinctly different tasks faster. We propose Model-Based Cross-Task Transfer (XTRA), a framework for sample-efficient online RL with scalable pretraining and finetuning of learned world models. By offline multi-task pretraining and online cross-task finetuning, we achieve substantial improvements over a baseline trained from scratch; we improve mean performance of model-based algorithm EfficientZero by 23%, and by as much as 71% in some instances. Project page: https://nicklashansen.github.io/xtra
[ MH1-2-3-4 ]

Pre-training with offline data and online fine-tuning using reinforcement learning is a promising strategy for learning control policies by leveraging the best of both worlds in terms of sample efficiency and performance. One natural approach is to initialize the policy for online learning with the one trained offline.In this work, we introduce a policy expansion scheme for this task. After learning the offline policy, we use it as one candidate policy in a policy set, and further learn another policy that will be responsible for further learning as an expansion to the policy set. The two policies will be composed in an adaptive manner for interacting with the environment. With this approach, the policy previously learned offline is fully retained during online learning, thus mitigating the potential issues such as destroying the useful behaviors of the offline policy in the initial stage of online learning while allowing the offline policy participate in the exploration naturally in an adaptive manner. Moreover, new useful behaviors can potentially be captured by the newly added policy through learning. Experiments are conducted on a number of tasks and the results demonstrate the effectiveness of the proposed approach.
[ MH1-2-3-4 ]
Extensive work has demonstrated that equivariant neural networks can significantly improve sample efficiency and generalization by enforcing an inductive bias in the network architecture. These applications typically assume that the domain symmetry is fully described by explicit transformations of the model inputs and outputs. However, many real-life applications contain only latent or partial symmetries which cannot be easily described by simple transformations of the input. In these cases, it is necessary to learn symmetry in the environment instead of imposing it mathematically on the network architecture. We discover, surprisingly, that imposing equivariance constraints that do not exactly match the domain symmetry is very helpful in learning the true symmetry in the environment. We differentiate between extrinsic and incorrect symmetry constraints and show that while imposing incorrect symmetry can impede the model's performance, imposing extrinsic symmetry can actually improve performance. We demonstrate that an equivariant model can significantly outperform non-equivariant methods on domains with latent symmetries both in supervised learning and in reinforcement learning for robotic manipulation and control problems.
[ MH1-2-3-4 ]
We study a modular approach to tackle long-horizon mobile manipulation tasks for object rearrangement, which decomposes a full task into a sequence of subtasks. To tackle the entire task, prior work chains multiple stationary manipulation skills with a point-goal navigation skill, which are learned individually on subtasks. Although more effective than monolithic end-to-end RL policies, this framework suffers from compounding errors in skill chaining, e.g., navigating to a bad location where a stationary manipulation skill can not reach its target to manipulate. To this end, we propose that the manipulation skills should include mobility to have flexibility in interacting with the target object from multiple locations and at the same time the navigation skill could have multiple end points which lead to successful manipulation. We operationalize these ideas by implementing mobile manipulation skills rather than stationary ones and training a navigation skill trained with region goal instead of point goal. We evaluate our multi-skill mobile manipulation method M3 on 3 challenging long-horizon mobile manipulation tasks in the Home Assistant Benchmark (HAB), and show superior performance as compared to the baselines.
[ MH1-2-3-4 ]
Many real-world reinforcement learning tasks require control of complex dynamical systems that involve both costly data acquisition processes and large state spaces. In cases where the expensive transition dynamics can be readily evaluated at specified states (e.g., via a simulator), agents can operate in what is often referred to as planning with a \emph{generative model}. We propose the AE-LSVI algorithm for best policy identification, a novel variant of the kernelized least-squares value iteration (LSVI) algorithm that combines optimism with pessimism for active exploration (AE). AE-LSVI provably identifies a near-optimal policy \emph{uniformly} over an entire state space and achieves polynomial sample complexity guarantees that are independent of the number of states. When specialized to the recently introduced offline contextual Bayesian optimization setting, our algorithm achieves improved sample complexity bounds. Experimentally, we demonstrate that AE-LSVI outperforms other RL algorithms in a variety of environments when robustness to the initial state is required.
[ MH1-2-3-4 ]
One of the grand challenges of reinforcement learning is the ability to generalize to new tasks. However, general agents require a set of rich, diverse tasks to train on. Designing a `foundation environment' for such tasks is tricky -- the ideal environment would support a range of emergent phenomena, an expressive task space, and fast runtime. To take a step towards addressing this research bottleneck, this work presents Powderworld, a lightweight yet expressive simulation environment running directly on the GPU. Within Powderworld, two motivating task distributions are presented, one for world-modelling and one for reinforcement learning. Each contains hand-designed test tasks to examine generalization. Experiments indicate that increasing the environment's complexity improves generalization for world models, yet causes reinforcement learning agents to struggle. Powderworld aims to support the study of generalization by providing a source of diverse tasks arising from the same core rules.
[ MH1-2-3-4 ]
We propose a novel framework for multitask reinforcement learning based on the minimum description length (MDL) principle. In this approach, which we term MDL-control (MDL-C), the agent learns the common structure among the tasks with which it is faced and then distills it into a simpler representation which facilitates faster convergence and generalization to new tasks. In doing so, MDL-C naturally balances adaptation to each task with epistemic uncertainty about the task distribution. We motivate MDL-C via formal connections between the MDL principle and Bayesian inference, derive theoretical performance guarantees, and demonstrate MDL-C's empirical effectiveness on both discrete and high-dimensional continuous control tasks.
[ MH1-2-3-4 ]
How well do reward functions learned with inverse reinforcement learning (IRL) generalize? We illustrate that state-of-the-art IRL algorithms, which maximize a maximum-entropy objective, learn rewards that overfit to the demonstrations. Such rewards struggle to provide meaningful rewards for states not covered by the demonstrations, a major detriment when using the reward to learn policies in new situations. We introduce BC-IRL a new inverse reinforcement learning method that learns reward functions that generalize better when compared to maximum-entropy IRL approaches. In contrast to the MaxEnt framework, which learns to maximize rewards around demonstrations, BC-IRL updates reward parameters such that the policy trained with the new reward matches the expert demonstrations better. We show that BC-IRL learns rewards that generalize better on an illustrative simple task and two continuous robotic control tasks, achieving over twice the success rate of baselines in challenging generalization settings.
[ MH1-2-3-4 ]

Recently, RL has shown its strong ability for visually complex tasks. However, it suffers from the low sample efficiency and poor generalization ability, which prevent RL from being useful in real-world scenarios. Inspired by the huge success of unsupervised pre-training methods on language and vision domains, we propose to improve the sample efficiency via a novel pre-training method for model-based RL. Instead of using pre-recorded agent trajectories that come with their own actions, we consider the setting where the pre-training data are action-free videos, which are more common and available in the real world. We introduce a two-phase training pipeline as follows: for the pre-training phase, we implicitly extract the hidden action embedding from videos and pre-train the visual representation and the environment dynamics network through a novel \Changes{forward-inverse} cycle consistency \Changes{(FICC)} objective based on vector quantization; for down-stream tasks, we finetune with small amount of task data based on the learned models. Our framework can significantly improve the sample efficiency on Atari Games with data of only one hour of game playing. We achieve 118.4\% mean human performance and 36.0\% median performance with only 50k environment steps, which is 85.6\% and 65.1\% better than the scratch EfficientZero model. We …
[ MH1-2-3-4 ]
Many important tasks involve some notion of long-term progress in multiple phases: e.g. to clean a shelf it must be cleared of items, cleaning products applied, and then the items placed back on the shelf. In this work, we explore the use of expert demonstrations in long-horizon tasks to learn a monotonically increasing function that summarizes progress. This function can then be used to aid agent exploration in environments with sparse rewards. As a case study we consider the NetHack environment, which requires long-term progress at a variety of scales and is far from being solved by existing approaches. In this environment, we demonstrate that by learning a model of long-term progress from expert data containing only observations, we can achieve efficient exploration in challenging sparse tasks, well beyond what is possible with current state-of-the-art approaches. We have made the curated gameplay dataset used in this work available at https://github.com/deepmind/nao_top10.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
Increasing the replay ratio, the number of updates of an agent's parameters per environment interaction, is an appealing strategy for improving the sample efficiency of deep reinforcement learning algorithms. In this work, we show that fully or partially resetting the parameters of deep reinforcement learning agents causes better replay ratio scaling capabilities to emerge. We push the limits of the sample efficiency of carefully-modified algorithms by training them using an order of magnitude more updates than usual, significantly improving their performance in the Atari 100k and DeepMind Control Suite benchmarks. We then provide an analysis of the design choices required for favorable replay ratio scaling to be possible and discuss inherent limits and tradeoffs.
[ MH1-2-3-4 ]
The rise of generalist large-scale models in natural language and vision has made us expect that a massive data-driven approach could achieve broader generalization in other domains such as continuous control. In this work, we explore a method for learning a single policy that manipulates various forms of agents to solve various tasks by distilling a large amount of proficient behavioral data. In order to align input-output (IO) interface among multiple tasks and diverse agent morphologies while preserving essential 3D geometric relations, we introduce morphology-task graph, which treats observations, actions and goals/task in a unified graph representation. We also develop MxT-Bench for fast large-scale behavior generation, which supports procedural generation of diverse morphology-task combinations with a minimal blueprint and hardware-accelerated simulator. Through efficient representation and architecture selection on MxT-Bench, we find out that a morphology-task graph representation coupled with Transformer architecture improves the multi-task performances compared to other baselines including recent discrete tokenization, and provides better prior knowledge for zero-shot transfer or sample efficiency in downstream multi-task imitation learning. Our work suggests large diverse offline datasets, unified IO representation, and policy representation and architecture selection through supervised learning form a promising approach for studying and advancing morphology-task generalization.
[ MH1-2-3-4 ]

Real world applications of Reinforcement Learning (RL) are often partially observable, thus requiring memory. Despite this, partial observability is still largely ignored by contemporary RL benchmarks and libraries. We introduce Partially Observable Process Gym (POPGym), a two-part library containing (1) a diverse collection of 15 partially observable environments, each with multiple difficulties and (2) implementations of 13 memory model baselines -- the most in a single RL library. Existing partially observable benchmarks tend to fixate on 3D visual navigation, which is computationally expensive and only one type of POMDP. In contrast, POPGym environments are diverse, produce smaller observations, use less memory, and often converge within two hours of training on a consumer-grade GPU. We implement our high-level memory API and memory baselines on top of the popular RLlib framework, providing plug-and-play compatibility with various training algorithms, exploration strategies, and distributed training paradigms. Using POPGym, we execute the largest comparison across RL memory models to date. POPGym is available at https://github.com/proroklab/popgym.
[ MH1-2-3-4 ]
By enabling agents to communicate, recent cooperative multi-agent reinforcement learning (MARL) methods have demonstrated better task performance and more coordinated behavior. Most existing approaches facilitate inter-agent communication by allowing agents to send messages to each other through free communication channels, i.e., \emph{cheap talk channels}. Current methods require these channels to be constantly accessible and known to the agents a priori. In this work, we lift these requirements such that the agents must discover the cheap talk channels and learn how to use them. Hence, the problem has two main parts: \emph{cheap talk discovery} (CTD) and \emph{cheap talk utilization} (CTU). We introduce a novel conceptual framework for both parts and develop a new algorithm based on mutual information maximization that outperforms existing algorithms in CTD/CTU settings. We also release a novel benchmark suite to stimulate future research in CTD/CTU.
[ MH1-2-3-4 ]

While instance-level explanation of GNN is a well-studied problem with plenty of approaches being developed, providing a global explanation for the behaviour of a GNN is much less explored, despite its potential in interpretability and debugging. Existing solutions either simply list local explanations for a given class, or generate a synthetic prototypical graph with maximal score for a given class, completely missing any combinatorial aspect that the GNN could have learned.In this work, we propose GLGExplainer (Global Logic-based GNN Explainer), the first Global Explainer capable of generating explanations as arbitrary Boolean combinations of learned graphical concepts. GLGExplainer is a fully differentiable architecture that takes local explanations as inputs and combines them into a logic formula over graphical concepts, represented as clusters of local explanations. Contrary to existing solutions, GLGExplainer provides accurate and human-interpretable global explanations that are perfectly aligned with ground-truth explanations (on synthetic data) or match existing domain knowledge (on real-world data). Extracted formulas are faithful to the model predictions, to the point of providing insights into some occasionally incorrect rules learned by the model, making GLGExplainer a promising diagnostic tool for learned GNNs.
[ MH1-2-3-4 ]
Recent studies have shown that structural perturbations are significantly effective in degrading the accuracy of Graph Neural Networks (GNNs) in the semi-supervised node classification (SSNC) task. However, why the gradient-based methods are so destructive is rarely explored. In this work, we discover an interesting phenomenon: the adversarial edges are not uniformly distributed on the graph. Nearly all perturbations are generated around the training nodes in poisoning attack. Combined with this phenomenon, we provide an explanation for the effectiveness of the gradient-based attack method from a data distribution perspective and revisit both poisoning attack and evasion attack in SSNC. From this new perspective, we empirically and theoretically discuss some other attack tendencies. Based on the analysis, we provide nine practical tips on both attack and defense and meanwhile leverage them to improve existing attack and defense methods. Moreover, we design a fast attack method and a self-training defense method, which outperform the state-of-the-art methods and can effectively scale to large graphs like ogbn-arxiv. We conduct extensive experiments on four benchmark datasets to verify our claims.
[ MH1-2-3-4 ]
Large language models (LLMs) have been shown to be capable of impressive few-shot generalisation to new tasks. However, they still tend to perform poorly on multi-step logical reasoning problems. Here we carry out a comprehensive evaluation of LLMs on 46 tasks that probe different aspects of logical reasoning. We show that language models tend to perform fairly well at single step inference or entailment tasks, but struggle to chain together multiple reasoning steps to solve more complex problems. In light of this, we propose a Selection-Inference (SI) framework that exploits pre-trained LLMs as general processing modules, and alternates between selection and inference to generate a series of interpretable, casual reasoning steps leading to the final answer. We show that a 7B parameter LLM used within the SI framework in a 5-shot generalisation setting, with no fine-tuning, yields a performance improvement of over 100% compared to an equivalent vanilla baseline on a suite of 10 logical reasoning tasks. The same model in the same setting even outperforms a significantly larger 280B parameter baseline on the same suite of tasks. Moreover, answers produced by the SI framework are accompanied by a causal natural-language-based reasoning trace, which has important implications for the safety …
[ MH1-2-3-4 ]

We consider the natural problem of learning a ReLU network from queries, which was recently remotivated by model extraction attacks. In this work, we present a polynomial-time algorithm that can learn a depth-two ReLU network from queries under mild general position assumptions. We also present a polynomial-time algorithm that, under mild general position assumptions, can learn a rich class of depth-three ReLU networks from queries. For instance, it can learn most networks where the number of first layer neurons is smaller than the dimension and the number of second layer neurons.These two results substantially improve state-of-the-art: Until our work, polynomial-time algorithms were only shown to learn from queries depth-two networks under the assumption that either the underlying distribution is Gaussian (Chen et al. (2021)) or that the weights matrix rows are linearly independent (Milli et al. (2019)). For depth three or more, there were no known poly-time results.
[ MH1-2-3-4 ]
As machine learning (ML) algorithms are increasingly used in high-stakes applications, concerns have arisen that they may be biased against certain social groups. Although many approaches have been proposed to make ML models fair, they typically rely on the assumption that data distributions in training and deployment are identical. Unfortunately, this is commonly violated in practice and a model that is fair during training may lead to an unexpected outcome during its deployment. Although the problem of designing robust ML models under dataset shifts has been widely studied, most existing works focus only on the transfer of accuracy. In this paper, we study the transfer of both fairness and accuracy under domain generalization where the data at test time may be sampled from never-before-seen domains. We first develop theoretical bounds on the unfairness and expected loss at deployment, and then derive sufficient conditions under which fairness and accuracy can be perfectly transferred via invariant representation learning. Guided by this, we design a learning algorithm such that fair ML models learned with training data still have high fairness and accuracy when deployment environments change. Experiments on real-world data validate the proposed algorithm.
[ MH1-2-3-4 ]
There is a growing interest in the machine learning community in developing predictive algorithms that are interpretable by design. To this end, recent work proposes to sequentially ask interpretable queries about data until a high confidence prediction can be made based on the answers obtained (the history). To promote short query-answer chains, a greedy procedure called Information Pursuit (IP) is used, which adaptively chooses queries in order of information gain. Generative models are employed to learn the distribution of query-answers and labels, which is in turn used to estimate the most informative query. However, learning and inference with a full generative model of the data is often intractable for complex tasks. In this work, we propose Variational Information Pursuit (V-IP), a variational characterization of IP which bypasses the need to learn generative models. V-IP is based on finding a query selection strategy and a classifier that minimize the expected cross-entropy between true and predicted labels. We prove that the IP strategy is the optimal solution to this problem. Therefore, instead of learning generative models, we can use our optimal strategy to directly pick the most informative query given any history. We then develop a practical algorithm by defining a finite-dimensional …
[ MH1-2-3-4 ]
Rigorous guarantees about the performance of predictive algorithms are necessary in order to ensure their responsible use. Previous work has largely focused on bounding the expected loss of a predictor, but this is not sufficient in many risk-sensitive applications where the distribution of errors is important. In this work, we propose a flexible framework to produce a family of bounds on quantiles of the loss distribution incurred by a predictor. Our method takes advantage of the order statistics of the observed loss values rather than relying on the sample mean alone. We show that a quantile is an informative way of quantifying predictive performance, and that our framework applies to a variety of quantile-based metrics, each targeting important subsets of the data distribution. We analyze the theoretical properties of our proposed method and demonstrate its ability to rigorously control loss quantiles on several real-world datasets.
[ MH1-2-3-4 ]
Errors in labels obtained via human annotation adversely affect a trained model's performance. Existing approaches propose ways to mitigate the effect of label error on a model's downstream accuracy, yet little is known about its impact on a model's group-based disparity metrics\footnote{Group-based disparity metrics like subgroup calibration, false positive rate, false negative rate, equalized odds, and equal opportunity are more often known, colloquially, as \textit{fairness metrics} in the literature. We use the term group-based disparity metrics in this work.}. Here we study the effect of label error on a model's group-based disparity metrics like group calibration. We empirically characterize how varying levels of label error, in both training and test data, affect these disparity metrics. We find that group calibration and other metrics are sensitive to train-time and test-time label error---particularly for minority groups. For the same level of label error, the percentage change in group calibration error for the minority group is on average 1.5 times larger than the change for the majority group. Towards mitigating the impact of training-time label error, we present an approach to estimate how changing a single training input's label affects a model's group disparity metric on a test set. We empirically assess the …
[ MH1-2-3-4 ]
As an intrinsic and fundamental property of big data, data heterogeneity exists in a variety of real-world applications, such as in agriculture, sociology, health care, etc. For machine learning algorithms, the ignorance of data heterogeneity will significantly hurt the generalization performance and the algorithmic fairness, since the prediction mechanisms among different sub-populations are likely to differ. In this work, we focus on the data heterogeneity that affects the prediction of machine learning models, and first formalize the Predictive Heterogeneity, which takes into account the model capacity and computational constraints. We prove that it can be reliably estimated from finite data with PAC bounds even in high dimensions. Additionally, we propose the Information Maximization (IM) algorithm, a bi-level optimization algorithm, to explore the predictive heterogeneity of data. Empirically, the explored predictive heterogeneity provides insights for sub-population divisions in agriculture, sociology, and object recognition, and leveraging such heterogeneity benefits the out-of-distribution generalization performance.
[ MH1-2-3-4 ]
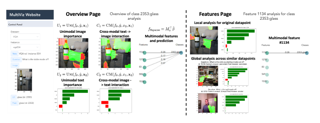
The promise of multimodal models for real-world applications has inspired research in visualizing and understanding their internal mechanics with the end goal of empowering stakeholders to visualize model behavior, perform model debugging, and promote trust in machine learning models. However, modern multimodal models are typically black-box neural networks, which makes it challenging to understand their internal mechanics. How can we visualize the internal modeling of multimodal interactions in these models? Our paper aims to fill this gap by proposing MultiViz, a method for analyzing the behavior of multimodal models by scaffolding the problem of interpretability into 4 stages: (1) unimodal importance: how each modality contributes towards downstream modeling and prediction, (2) cross-modal interactions: how different modalities relate with each other, (3) multimodal representations: how unimodal and cross-modal interactions are represented in decision-level features, and (4) multimodal prediction: how decision-level features are composed to make a prediction. MultiViz is designed to operate on diverse modalities, models, tasks, and research areas. Through experiments on 8 trained models across 6 real-world tasks, we show that the complementary stages in MultiViz together enable users to (1) simulate model predictions, (2) assign interpretable concepts to features, (3) perform error analysis on model misclassifications, and (4) …
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
This paper presents a method to build explicit tensor-train (TT) representations. We show that a wide class of tensors can be explicitly represented with sparse TT-cores, obtaining, in many cases, optimal TT-ranks. Numerical experiments show that our method outperforms the existing ones in several practical applications, including game theory problems. Theoretical estimations of the number of operations show that in some problems, such as permanent calculation, our methods are close to the known optimal asymptotics, which are obtained by a completely different type of methods.
[ MH1-2-3-4 ]

Studies on benign overfitting provide insights for the success of overparameterized deep learning models. In this work, we examine whether overfitting is truly benign in real-world classification tasks. We start with the observation that a ResNet model overfits benignly on Cifar10 but not benignly on ImageNet. To understand why benign overfitting fails in the ImageNet experiment, we theoretically analyze benign overfitting under a more restrictive setup where the number of parameters is not significantly larger than the number of data points. Under this mild overparameterization setup, our analysis identifies a phase change: unlike in the previous heavy overparameterization settings, benign overfitting can now fail in the presence of label noise. Our analysis explains our empirical observations, and is validated by a set of control experiments with ResNets. Our work highlights the importance of understanding implicit bias in underfitting regimes as a future direction.
[ MH1-2-3-4 ]
[ MH1-2-3-4 ]
This paper uses information-theoretic tools to analyze the generalization error in unsupervised domain adaptation (UDA). We present novel upper bounds for two notions of generalization errors. The first notion measures the gap between the population risk in the target domain and that in the source domain, and the second measures the gap between the population risk in the target domain and the empirical risk in the source domain. While our bounds for the first kind of error are in line with the traditional analysis and give similar insights, our bounds on the second kind of error are algorithm-dependent, which also provide insights into algorithm designs. Specifically, we present two simple techniques for improving generalization in UDA and validate them experimentally.
[ MH1-2-3-4 ]
Content creators compete for user attention. Their reach crucially depends on algorithmic choices made by developers on online platforms. To maximize exposure, many creators adapt strategically, as evidenced by examples like the sprawling search engine optimization industry. This begets competition for the finite user attention pool. We formalize these dynamics in what we call an exposure game, a model of incentives induced by modern algorithms including factorization and (deep) two-tower architectures. We prove that seemingly innocuous algorithmic choices—e.g., non-negative vs. unconstrained factorization—significantly affect the existence and character of (Nash) equilibria in exposure games. We proffer use of creator behavior models like ours for an (ex-ante) pre-deployment audit. Such an audit can identify misalignment between desirable and incentivized content, and thus complement post-hoc measures like content filtering and moderation. To this end, we propose tools for numerically finding equilibria in exposure games, and illustrate results of an audit on the MovieLens and LastFM datasets. Among else, we find that the strategically produced content exhibits strong dependence between algorithmic exploration and content diversity, and between model expressivity and bias towards gender-based user and creator groups.
[ MH1-2-3-4 ]
Catastrophic forgetting and the stability-plasticity dilemma are two major obstacles to continual learning. In this paper we first propose a theoretical analysis of a SPCA-based continual learning algorithm using high dimensional statistics. Second, we design OSCL (Optimized Spca-based Continual Learning) which builds on a flexible task optimization based on the theory. By optimizing a single task, catastrophic forgetting can be prevented theoretically. While optimizing multi-tasks, the trade-off between integrating knowledge from the new task and retaining previous knowledge of the old task can be achieved by assigning appropriate weights to corresponding tasks in compliance with the objectives. Experimental results confirm that the various theoretical conclusions are robust to a wide range of data distributions. Besides, several applications on synthetic and real data show that the proposed method while being computationally efficient, achieves comparable results with some state of the art.
[ MH1-2-3-4 ]
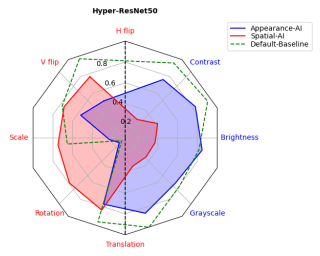
Contrastive self-supervised learning methods famously produce high quality transferable representations by learning invariances to different data augmentations. Invariances established during pre-training can be interpreted as strong inductive biases. However these may or may not be helpful, depending on if they match the invariance requirements of downstream tasks or not. This has led to several attempts to learn task-specific invariances during pre-training, however, these methods are highly compute intensive and tedious to train. We introduce the notion of amortized invariance learning for contrastive self supervision. In the pre-training stage, we parameterize the feature extractor by differentiable invariance hyper-parameters that control the invariances encoded by the representation. Then, for any downstream task, both linear readout and task-specific invariance requirements can be efficiently and effectively learned by gradient-descent. We evaluate the notion of amortized invariances for contrastive learning over two different modalities: vision and audio, on two widely-used contrastive learning methods in vision: SimCLR and MoCo-v2 with popular architectures like ResNets and Vision Transformers, and SimCLR with ResNet-18 for audio. We show that our amortized features provide a reliable way to learn diverse downstream tasks with different invariance requirements, while using a single feature and avoiding task-specific pre-training. This provides an exciting perspective …
[ MH1-2-3-4 ]
Visualization methods based on the nearest neighbor graph, such as t-SNE or UMAP, are widely used for visualizing high-dimensional data. Yet, these approaches only produce meaningful results if the nearest neighbors themselves are meaningful. For images represented in pixel space this is not the case, as distances in pixel space are often not capturing our sense of similarity and therefore neighbors are not semantically close. This problem can be circumvented by self-supervised approaches based on contrastive learning, such as SimCLR, relying on data augmentation to generate implicit neighbors, but these methods do not produce two-dimensional embeddings suitable for visualization. Here, we present a new method, called t-SimCNE, for unsupervised visualization of image data. T-SimCNE combines ideas from contrastive learning and neighbor embeddings, and trains a parametric mapping from the high-dimensional pixel space into two dimensions. We show that the resulting 2D embeddings achieve classification accuracy comparable to the state-of-the-art high-dimensional SimCLR representations, thus faithfully capturing semantic relationships. Using t-SimCNE, we obtain informative visualizations of the CIFAR-10 and CIFAR-100 datasets, showing rich cluster structure and highlighting artifacts and outliers.
[ MH1-2-3-4 ]
Unsupervised meta-learning (UML) essentially shares the spirit of self-supervised learning (SSL) in that their goal aims at learning models without any human supervision so that the models can be adapted to downstream tasks. Further, the learning objective of self-supervised learning, which pulls positive pairs closer and repels negative pairs, also resembles metric-based meta-learning. Metric-based meta-learning is one of the most successful meta-learning methods, which learns to minimize the distance between representations from the same class. One notable aspect of metric-based meta-learning, however, is that it is widely interpreted as a set-level problem since the inference of discriminative class prototypes (or set representations) from few examples is crucial for the performance of downstream tasks. Motivated by this, we propose Set-SimCLR, a novel self-supervised set representation learning framework for targeting UML problem. Specifically, our Set-SimCLR learns a set encoder on top of instance representations to maximize the agreement between two sets of augmented samples, which are generated by applying stochastic augmentations to a given image. We theoretically analyze how our proposed set representation learning can potentially improve the generalization performance at the meta-test. We also empirically validate its effectiveness on various benchmark datasets, showing that Set-SimCLR largely outperforms both UML and instance-level …
[ MH1-2-3-4 ]
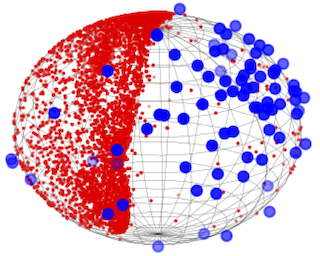
[ MH1-2-3-4 ]
A successful paradigm in representation learning is to perform self-supervised pretraining using tasks based on mini-batch statistics; (e.g., SimCLR, VICReg, SwAV, MSN). We show that in the formulation of all these methods is an overlooked prior to learn features that enable uniform clustering of the data. While this prior has led to remarkably semantic representations when pretraining on class-balanced data, such as ImageNet, we demonstrate that it can hamper performance when pretraining on class-imbalanced data. By moving away from conventional uniformity priors and instead preferring power-law distributed feature clusters, we show that one can improve the quality of the learned representations on real-world class-imbalanced datasets. To demonstrate this, we develop an extension of the Masked Siamese Networks (MSN) method to support the use of arbitrary features priors.
Social: Martha White Mon 1 May 05:00 p.m.
Martha White is an Associate Professor of Computing Science at the University of Alberta and a PI of Amii--the Alberta Machine Intelligence Institute--which is one of the top machine learning centres in the world. She holds a Canada CIFAR AI Chair and received IEEE's "AIs 10 to Watch: The Future of AI" award in 2020. She has authored more than 50 papers in top journals and conferences. Martha is an associate editor for TPAMI, and has served as co-program chair for ICLR and area chair for many conferences in AI and ML, including ICML, NeurIPS, AAAI and IJCAI. Her research focus is on developing algorithms for agents continually learning on streams of data, with an emphasis on representation learning and reinforcement learning.
Social: Arthur Gretton Mon 1 May 05:00 p.m.
Arthur Gretton is a Professor with the Gatsby Computational Neuroscience Unit, and director of the Centre for Computational Statistics and Machine Learning (CSML) at UCL. He received degrees in Physics and Systems Engineering from the Australian National University, and a PhD with Microsoft Research and the Signal Processing and Communications Laboratory at the University of Cambridge. He previously worked at the MPI for Biological Cybernetics, and at the Machine Learning Department, Carnegie Mellon University. Arthur's recent research interests in machine learning include causal inference and representation learning, design and training of generative models (implicit: Wasserstein gradient flows, GANs; and explicit: energy-based models), and nonparametric hypothesis testing. He has been an associate editor at IEEE Transactions on Pattern Analysis and Machine Intelligence from 2009 to 2013, an Action Editor for JMLR since April 2013, an Area Chair for NeurIPS in 2008 and 2009, a Senior Area Chair for NeurIPS in 2018 and 2021, an Area Chair for ICML in 2011 and 2012, a Senior Area Chair for ICML in 2022, a member of the COLT Program Committee in 2013, and a member of Royal Statistical Society Research Section Committee since January 2020. Arthur was program chair for AISTATS in 2016 (with Christian Robert), tutorials chair for ICML 2018 (with Ruslan Salakhutdinov), workshops chair for ICML 2019 (with Honglak Lee), program chair for the Dali workshop in 2019 (with Krikamol Muandet and Shakir Mohammed), and co-organsier of the Machine Learning Summer School 2019 in London (with Marc Deisenroth).
Social: Jascha Sohl-Dickstein Mon 1 May 05:00 p.m.
Jascha is a senior staff research scientist in the Brain group at Google, where he leads a research team with interests spanning machine learning, physics, and neuroscience. Jascha is most (in)famous for inventing diffusion models. His recent work has focused on theory of overparameterized neural networks, meta-training of learned optimizers, and understanding the capabilities of large language models. Before working at Google he was a visiting scholar in Surya Ganguli's lab at Stanford University, and an academic resident at Khan Academy. He earned his PhD in 2012 in the Redwood Center for Theoretical Neuroscience at UC Berkeley, in Bruno Olshausen's lab. Prior to his PhD, he worked on Mars.
blog: https://sohl-dickstein.github.io/ (semi-)professional website: http://www.sohldickstein.com/
Social: Alexander Rush Mon 1 May 05:00 p.m.
http://rush-nlp.com/